Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS. Часть 1



Оглавление
Vivado HLS: Разработка простого IP-блока
Высокоуровневые средства разработки: что это и зачем оно нужно?
Шаг 1: Создание нового проекта
Способ 1
Способ 2
Шаг 2: Разработка IP-блока
Шаг 3: Пишем тест
Шаг 4: Запускаем тест
Шаг 5: Подготовка к синтезу
Шаг 6: Синтез функций, ко-симуляция, экспорт IP
Список литературы
Эта статья – небольшое руководство для тех, кто хочет сделать собственный IP-блок для FPGA (фирмы Xilinx) с помощью HLS (High Level Synthesis [1], синтез с языков высокого уровня). Ниже по порядку будут описаны основные шаги такой разработки. В качестве примера будет разработан простейший ШИМ с управлением по шине AXI4-Lite, который будет изменять яркость светодиода на отладочной плате MiniZed [2].
Предполагается, что у вас уже установлена Vivado. Я использовал Vivado HL WebPACK Edition 2018.2.
Vivado HLS транслирует в описания на HDL (которые можно использовать для дальнейшего синтеза и имплементации) код на языках С/С++ или SystemC. Использование HLS [3, 4] снижает порог входа в разработку на FPGA, т. к. позволяет писать код разработчику, не знакомому с HDL: для создания своего работающего модуля (или даже проекта) уже не обязательно досконально знать, что такое «тактовая частота» и некоторые другие низкоуровневые вещи. Естественно, редко люди с таким уровнем подготовки создают проект на FPGA целиком, «от и до». Но реализовать на FPGA хотя бы на уровне прототипа отдельный модуль, исполняющий знакомый специалисту (программисту для ПК, инженеру по обработке сигналов, математику и т. д.) алгоритм становится для него вполне «подъёмной» задачей и без постоянного и плотного привлечения ПЛИС-разработчика. Также использование HLS удобно, когда важно добиться работы на FPGA поведенческой модели, не беспокоясь об объёме занятых ресурсов кристалла.
Итак, Vivado HLS позволяет:
• Вести разработку на C-уровне
• Верифицировать на С-уровне
• Контролировать процесс синтеза с помощью директив компилятора “pragma HLS”
• Создавать код, работающий на любом семействе FPGA
Предлагаю два варианта: первый – просто «протыкать» GUI и заполнить пошагово все описанные поля. Второй способ – для совсем ленивых: запустить tcl-скрипт, который сам создаст проект и добавит файлы (кстати, аналогичным способом можно сразу запустить тест, синтез, ко симуляцию и экспорт IP – совсем без вызова GUI, что иногда может быть очень удобно).• Верифицировать на С-уровне
• Контролировать процесс синтеза с помощью директив компилятора “pragma HLS”
• Создавать код, работающий на любом семействе FPGA
Способ 1
1. Запускаем Vivado HLS. В Windows – двойным щелчком по соответствующей пиктограмме на рабочем столе, в Linux – набрав в командной строке «vivado_hls». Далее все шаги одинаковы для обеих ОС.
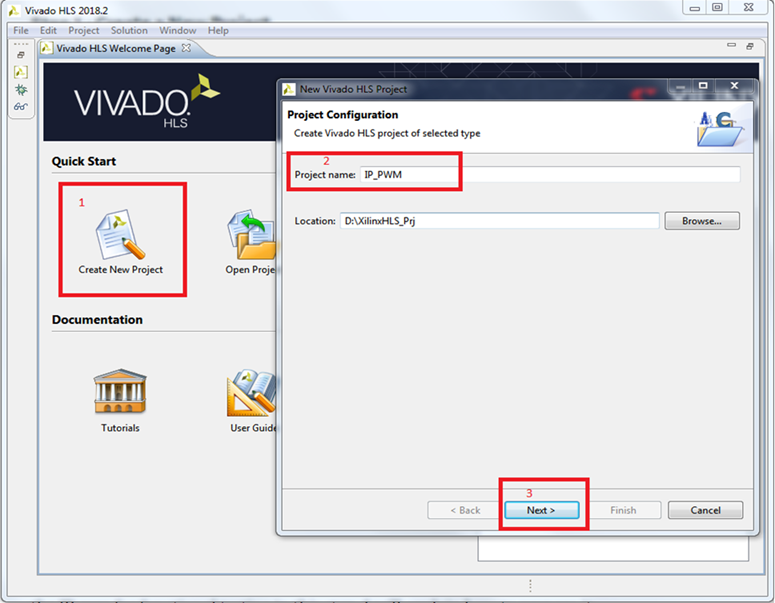
Рисунок 1 – Создание проекта
2. Рисунок 1:
2.1. Жмем «Создать новый проект».
2.2. Называем его «IP_PWM». Директория, где будет храниться проект, нам не важна.
2.3. Жмем «Далее».
3. Рисунок 2:
3.1. Жмем «Добавить файлы» (в этом окне – файлы исходных текстов наших модулей). Если вы создаете свой проект, и пока не знаете, как захотите назвать файлы, то можно просто нажать «Далее».
3.2. «Top Function» для HLS – это аналог модуля верхнего уровня для проекта на HDL. Набираем тут «PWM».
3.3. Жмем «Далее».
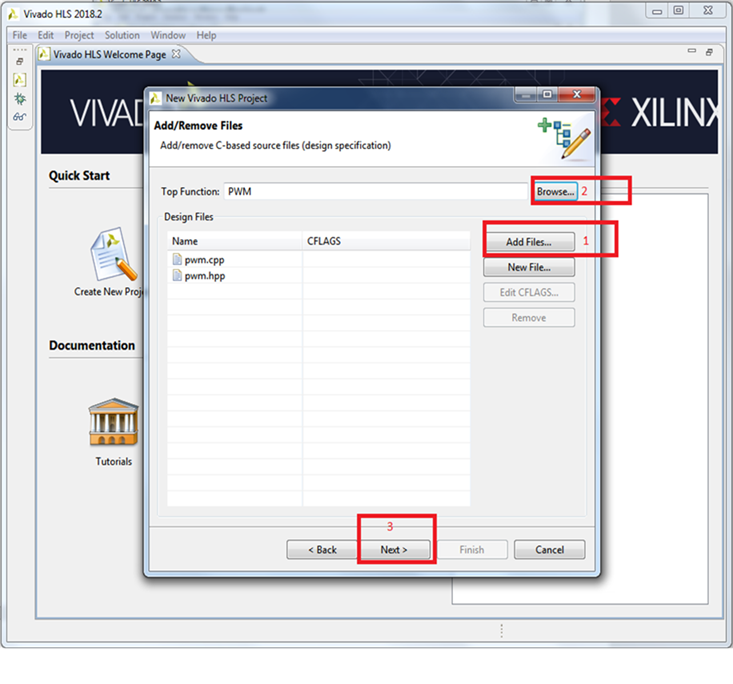
Рисунок 2 – Добавляем файлы исходных текстов модулей
4. Рисунок 3:
4.1. Жмем «Добавить файлы» (на сей раз – файлы тестов). Если Вы создаете свой проект, и пока не знаете, как захотите назвать файлы, то можно просто нажать «Далее».
4.2. Жмем «Далее».

Рисунок 3 – Добавляем файл теста
5. Рисунок 4:
5.1. Называем решение «PWM».
Выбираем свою ПЛИС. Если у вас есть какая-нибудь отладочная плата, то можно прописать в файл VivadoHls_boards.xml строку по аналогии с теми, что уже там написаны. Для MiniZed она выглядит так:
<board name="Xilinx_Minized" display_name="Minized" family="zynq" part="xc7z007sclg225-1" device="xc7z007s" package="clg225" speedgrade="-1" vendor="em.avnet.com" />Файл можно найти в
путь_к_директории_установки\Vivado\2018.2\common\config.5.2. Период оставляем равным 10 нс.
5.3. Жмем «Завершить»

Рисунок 4 – Выбираем ПЛИС/плату
Способ 2
1. В windows запускаем командную строку Vivado HLS (рисунок 5), в Linux запускаем новый терминал.
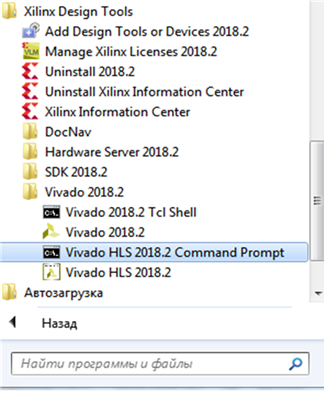
Рисунок 5 – Запуск командной строки Vivado HLS
2. В командной строке пишем cd путь_к_директории_где_лежат_исходники (Рисунок 6).

Рисунок 6 – Заходим в папку с файлами проекта
3. Пишем в консоль vivado_hls -f ip_pwm.tcl (Рисунок 7).
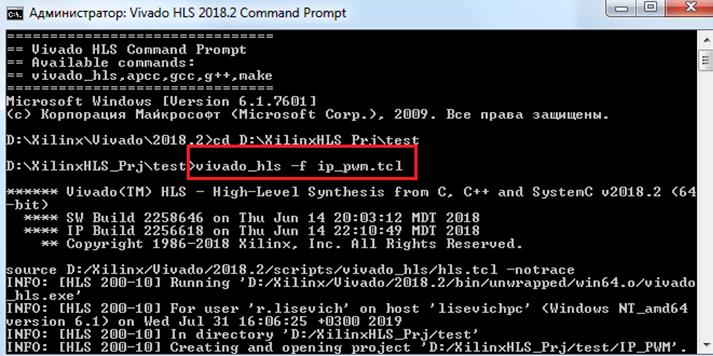
Рисунок 7 – Запускаем tcl скрипт
4. Пишем в консоль vivado_hls -p IP_PWM (Рисунок 8).
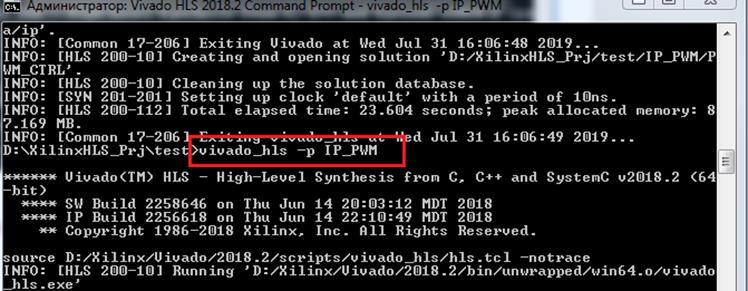
Рисунок 8 – Запуск проекта из консоли
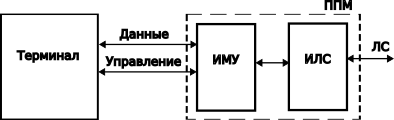
Разработку нашего IP начнем с рисования структурной схемы системы. Т. к. в нашем распоряжении – система на кристалле (на плате MiniZed стоит SoC Xilinx Zynq [5]), то мы являемся счастливыми обладателями ARM-ядра, и управлять нашим IP станем с его помощью. Если же у Вас просто ПЛИС без процессорной части, то Вы можете поднять софт-процессор Microblaze [6] и управлять нашим IP им.

Рисунок 9 – Структурная схема
Наш ШИМ будет состоять из двух функций. Первая будет реализовывать интерфейс AXI4-Lite, через который мы будем задавать значения регистров. Вторая функция будет реализовывать счетчик (ШИМ представляет собой счетчик, который, досчитав до заданного ему значения, меняет состояние выхода регистра на противоположное). Почему это реализовано в виде двух разных функций, станет понятно, когда мы дойдем до написания теста к нашему модулю.
Если в прошлой части Вы сделали все правильно, то в левой части рабочего окна у Вас должен появиться Проводник (Рисунок 10). При этом если Вы создавали проект первым способом, то решения PWM_CTRL у Вас не будет, и мы добавим его позже.
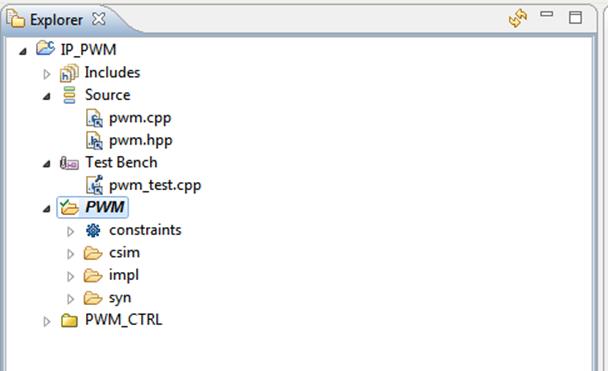
Рисунок 10 – Проводник в Vivado HLS
Приступим к реализации. Для начала подключим заголовочные файлы, которые нам понадобятся. В проекте все заголовочные файлы, определенные новые имена существующих типов данных и прототипы функций вынесены в отдельный файл pwm.hpp (Рисунок 11).
Для С++ заголовочный файл <ap_int.h> определяет целочисленные типы данных произвольной точности: ap_int<N> и ap_uint<N> (беззнаковый), где N может принимать значение от 1 до 1024 (можно переопределить и до значения в 32768). Рекомендуется использовать этот тип данных, даже если у Вас разрядность совпадает со стандартными типами данных, такими как char, int и т.д., потому что у переменных такого типа есть методы для работы с операциями на битовом уровне, т. е. мы можем получать или устанавливать значения определенных бит внутри переменной, объединять переменные и многое другое (все подробности смотрите в UG902 [4]).
Сразу определим новые имена типов данных для удобства.
Заголовочный файл <stdio.h> – стандартный заголовочный файл с функциями ввода-вывода. Он нам понадобится, когда мы будем писать тест для нашего IP.
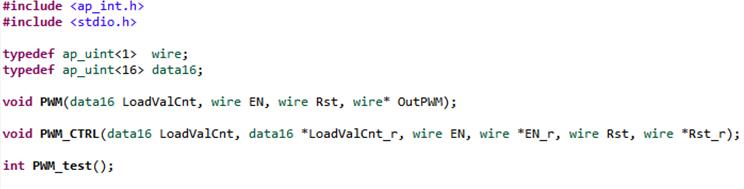
Рисунок 11 – Файл pwm.hpp
Теперь следует написать функцию, которая бы непосредственно выполняла необходимую нам задачу. Во время этого шага мы пока не обращаем внимания на то, во что она будет синтезирована как потом подготовить функцию к синтезу, будет рассказано позже.
Начнем с функции PWM_CTRL (Рисунок 12). Эта функция должна просто хранить и выдавать значения, которые будут управлять счетчиком. Она не должна ничего возвращать, поэтому её тип возврата – void. Т. к. счетчик будет шестнадцатиразрядный, то загружаемое значение должно быть той же разрядности. Сигналы включения и программного сброса – однобитные.
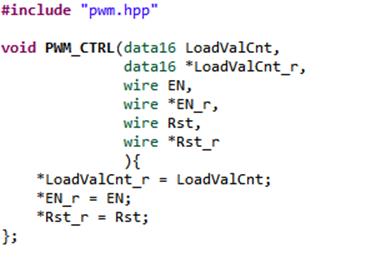
Рисунок 12 – Функция PWM_CTRL
Теперь рассмотрим функцию PWM (Рисунок 13). Эта функция должна увеличивать значение переменной counter каждый раз, когда мы вызываем эту функцию, при условии, что сброс не выставлен (т. е. Rst == 0) и активно разрешение счёта (EN == 1). Поэтому мы используем ключевое слово static (это значит, что переменная counter создается и инициализируется только один раз, и каждый следующий вызов этой функции будет использовать её предыдущее значение). Когда значение в счетчике перестанет быть меньше значения, с которым мы его сравниваем, выход изменит значение с логической «1» на логический «0».
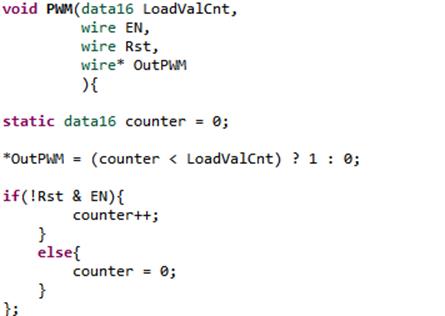
Рисунок 13 – Функция PWM
Нам необходимо проверить, что при достижении счетчиком значения, равного заданному (LoadValCnt), выход изменит значение с «1» на «0». Для этого зададим значения с помощью PWM_CTRL и вызовем наш счетчик (LoadValCnt + 1) раз. Переменная res увеличивается на 1, если выход ШИМ равен «1», и значение счетчика на следующей итерации должно стать равным значению LoadValCnt. При достижении значения LoadValCnt выход должен быть равен «0», а переменная res уменьшится на 1. Если что-то будет не так, то res не будет равна нулю. После написания это выглядит так: Рисунок 14.

Рисунок 14 –Тест
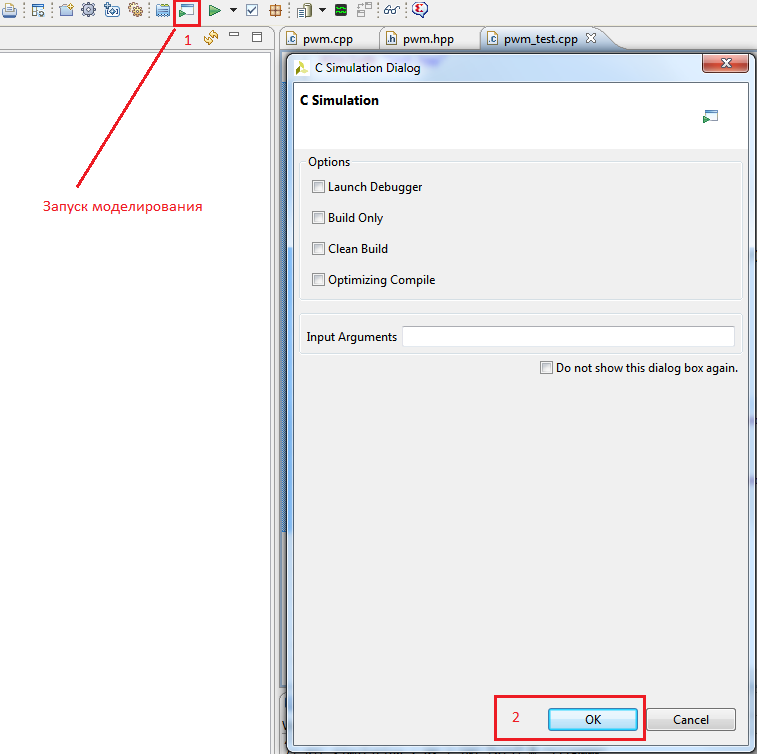
Рисунок 15 – Запускаем моделирование
Если все прошло нормально, то в консоли будет написано, что тест прошел успешно, без ошибок (Рисунок 16).

Рисунок 16 – Результат теста
Теперь перейдем к объяснению, почему было решено разделить наш IP-блок на две функции. Если бы весь функционал размещался в одной функции, то при каждом её вызове это отражалось бы в ко-симуляции, как транзакция записи по шине AXI4 Lite. Но такое поведение не соответствует заложенным нами в систему идеям, т. к. при использовании IP-блоков их регистры обычно только конфигурируются при инициализации и реконфигурируются по каким-то событиям, а в ходе обычной работы доступа к ним не осуществляется.
Контролировать процесс синтеза можно с помощью директив компилятора pragma HLS. Если этого не сделать, то в ходе синтеза будут применены параметры по умолчанию. Примененные директивы можно посмотреть в правой части рабочего экрана во вкладке директив.
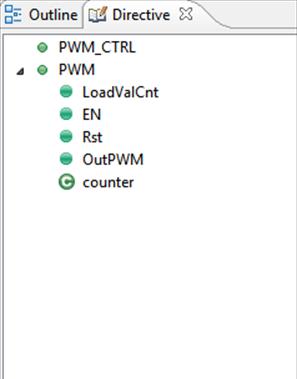
Рисунок 17 – Вкладка с директивами
Дважды щёлкнем по «PWM», откроется редактор директив, выберем в нём директиву и опции, как показано на рисунке ниже (Рисунок 18). Выбранная опция указывает компилятору, что на уровне функции нам не нужны сигналы управления (т. к. управлять мы будем сами). Директивы могут находиться непосредственно в описании функции, а могут находиться в файле с директивами, в нашем случае будем использовать первый вариант. Теперь сделаем тоже самое для OutPWM (Рисунок 19). Если нажать кнопку «Help», то можно подробно ознакомиться с каждой опцией, которая относится к этой директиве. Также там можно прочитать, какие опции используются по умолчанию. На этом подготовка функции PWM к синтезу окончена.
Замечание по поводу ключевого слова static. В выходном HDL-коде соответствующая переменная будет описана в виде регистра. Но это не означает, что нужно использовать static в описании всех переменных, которые должны хранить свое значение в течение нескольких циклов, HLS способен распознать данную ситуацию сам. Но конкретно в нашем случае ключевое слово static указать необходимо, т. к. без него каждый новый вызов функции приводил бы к обнулению переменной counter.
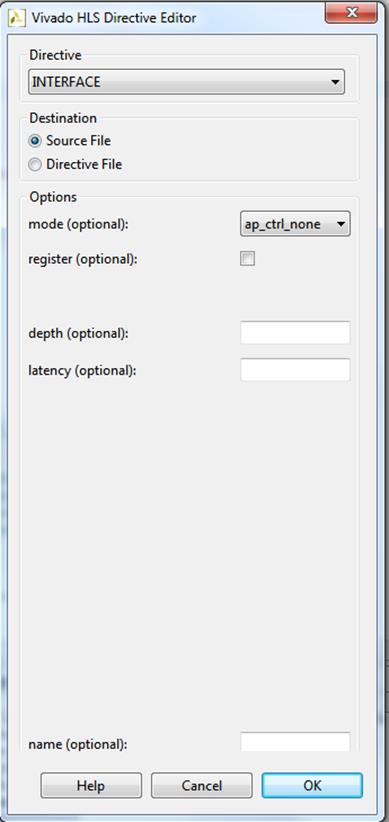
Рисунок 18 – Выбор директивы для PWM

Рисунок 19 – Выбор директивы для OutPWM
Теперь подготовим к синтезу функцию PWM_CTRL. Для начала нужно указать в настройках проекта функцию, которая будет синтезирована (Рисунок 20). Тут, по аналогии с проектом на HDL, синтезируется все, что включается в модуль (в HLS – функцию), указанную «топовой» (верхнего уровня).
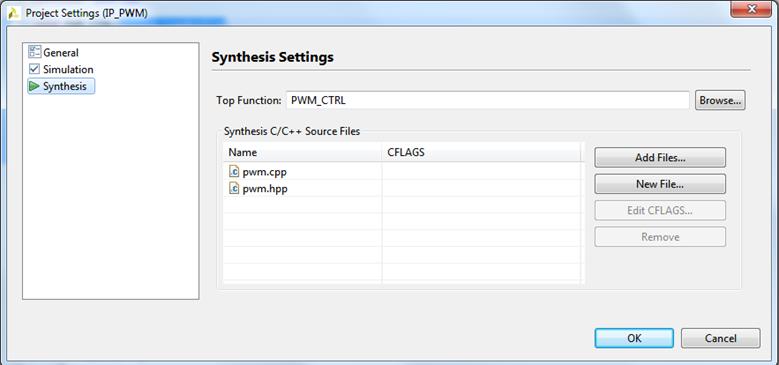
Рисунок 20 – Выбор функции для синтеза
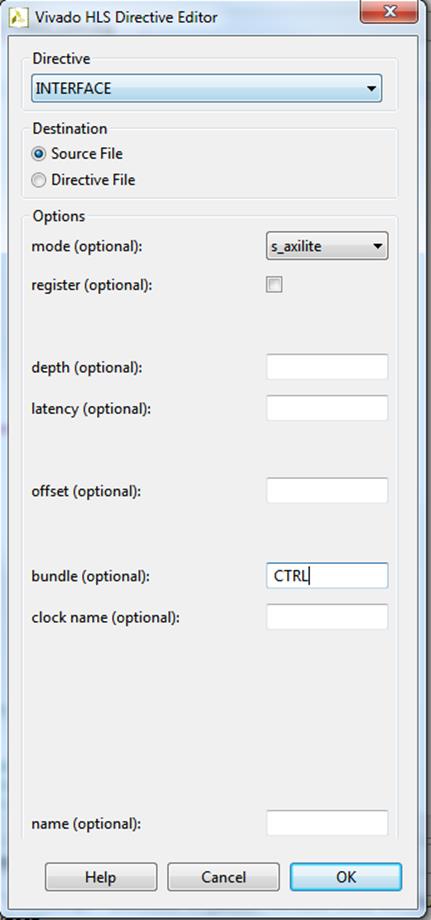
Рисунок 21 – Выбор директивы для PWM_CTRL
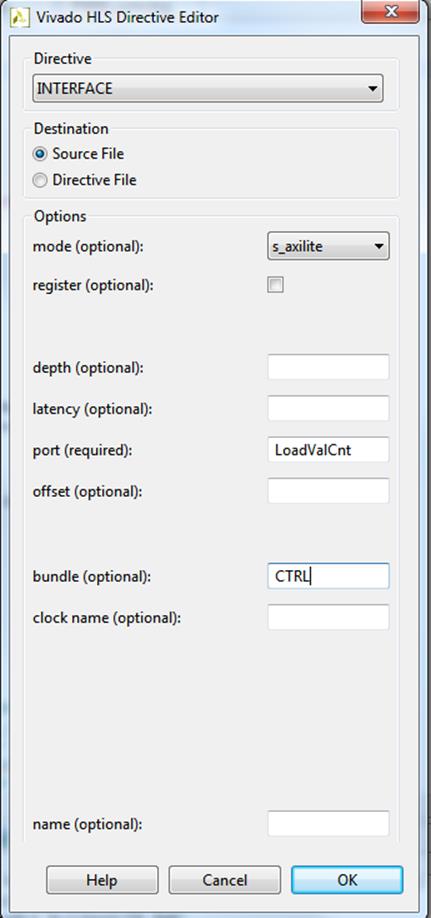
Рисунок 22 – Выбор директивы для переменной LoadValCnt
Повторим последнее действие для переменных Rst и EN. Для выходов применим директиву такую же, как ранее для вывода OutPWM (Рисунок 19). Должно получится, как на рисунке ниже (Рисунок 23):
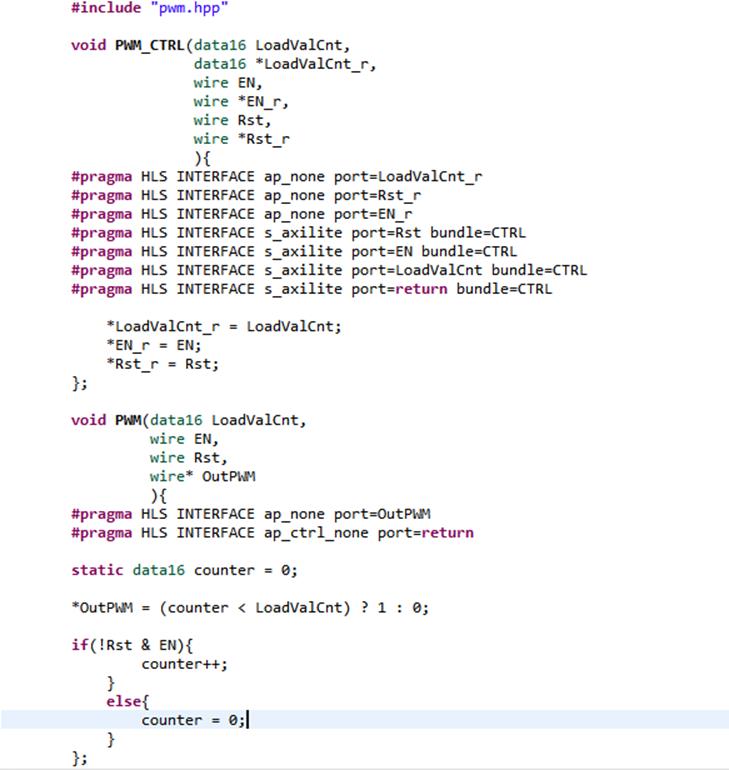
Рисунок 23 – Функции, подготовленные к синтезу

Рисунок 24 – Создаем новое решение
Если вы делали все по пунктам, то у вас должна быть указана функция для синтеза PWM_CTRL; если делали не по пунктам, указываем её сейчас. Если у вас свой проект или вы создавали проект первым способ, то нужно в настройках решения указать, что нам нужен сброс с низким активным уровнем (Рисунок 25). Затем запускаем синтез (Рисунок 26).
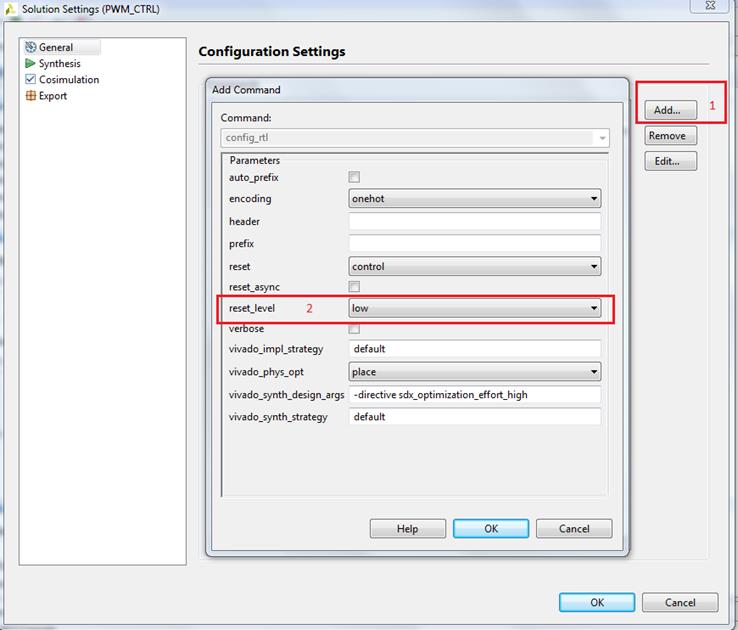
Рисунок 25 – Выбор активного уровня сброса

Рисунок 26 – Запуск синтеза
После того, как синтез закончится, автоматически откроется отчет, в котором можно посмотреть получившуюся долю использования ресурсов кристалла (утилизацию) и то, какие интерфейсы будут у нашего IP-блока (Рисунок 27). Как видим, добавились порты тактирования, сброса и прерываний.
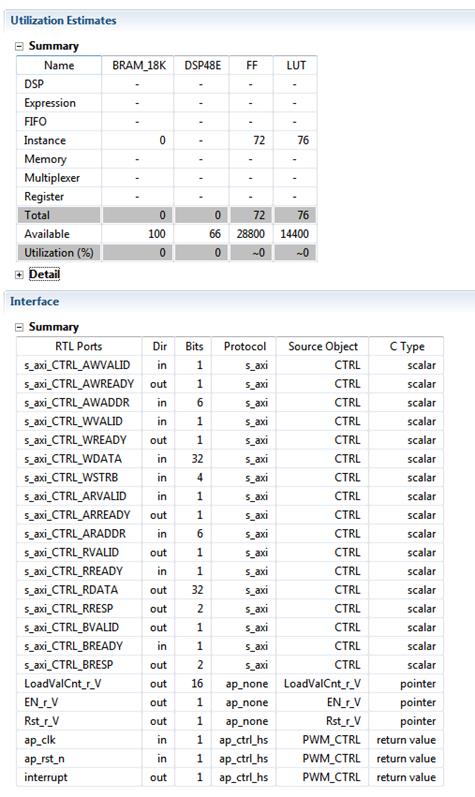
Рисунок 27 – Отчет после синтеза

Рисунок 28 – Запуск ко-симуляции
После того, как ко-симуляция закончится, автоматически откроется отчет. Не пугаемся того, что у нас в нём везде нули. Раздел «Latency» показывает, какое количество периодов тактовой частоты необходимо функции для вычисления всех выходных значений – но у нас ничего не вычисляется, а просто значение регистра, задаваемого через AXI, присваивается выходному сигналу. Раздел «Interval» показывает, какое количество периодов тактовой частоты необходимо функции, чтобы она могла принять новые данные на вход.
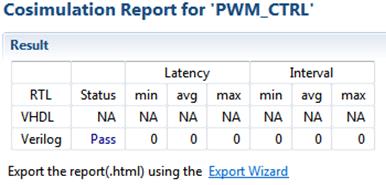
Рисунок 29 – Результат ко-симуляции функции PWM_CTRL
Осталось экспортировать IP. Для этого нажимаем на панели инструментов «Export RTL». В появившемся окне можно указать настройки экспорта и выполнить синтез средствами Vivado, что даст более точную оценку параметров IP, но и займет больше времени (Рисунок 32).
Сделаем активным решение PWM, дважды щёлкнув по нему в Проводнике. Выберем функцию PWM для синтеза (как мы это делали, можно посмотреть тут: Рисунок 20). Если у вас свой проект или вы создавали проект первым способ, то нужно в настройках решения указать, что нам нужен сброс с низким активным уровнем (Рисунок 25). Запускаем синтез, а затем и ко-симуляцию с опцией «Dump Trace all».
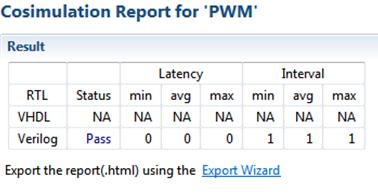
Рисунок 30 – Результат ко-симуляции функции PWM
Давайте теперь посмотрим временные диаграммы. Для этого жмем на панели инструментов кнопку «Open Wave Viewer».
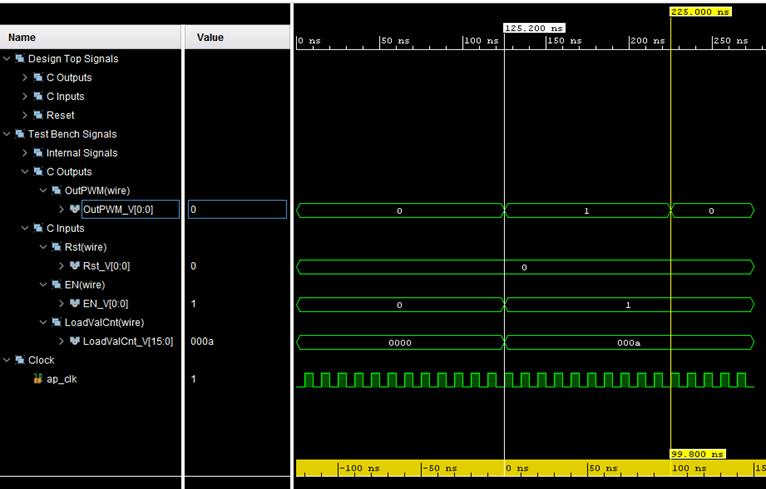
Рисунок 31 – Временные диаграммы для IP PWM
Экспортируем IP PWM; тут все точно так же, как с прошлым IP-блоком (Рисунок 32).
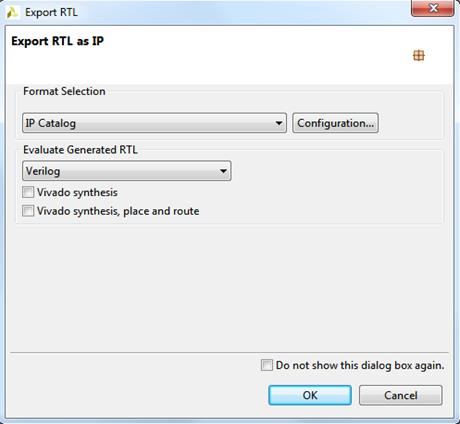
Рисунок 32 – Экспорт IP
Следующим шагом является интеграция этих IP в блок-дизайн в Vivado и их тестирование с помощью SDK в standalone-режиме.
1. Vivado High-Level Synthesis
2. Осваиваем Zynq-7000s с бесплатной отладкой
3. UG871. Vivado Design Suite Tutorial: High-Level Synthesis
4. UG902. Vivado Design Suite UserGuide: High-Level Synthesis
5. Xilinx Zynq-7000 SoC
6. Разработка софт-процессорной системы на базе MicroBlaze (цикл статей)
Продолжение следует, не забудь подписаться, чтобы не пропустить
Скачать статью в формате PDF. Зарегистрируйтесь, это не займет много времени. Статья в формате PDF