Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS Часть 3



Оглавление
Аннотация
Работаем с IP-блоками HLS в Xilinx SDK
Список литературы
В этой части будут показаны основные шаги необходимые для запуска и работы разработанной в прошлых частях системы [1, 2]. Будет показано, как можно использовать API, которое автоматически генерируется для IP-блоков с интерфейсом AXI4-Lite.
Начнем с экспорта в SDK. Для этого в Vivado идем в меню File→Export→Export Hardware (Рисунок 1). Отмечаем галочку “Include bitstream”. Затем снова идем в меню File→Launch SDK.

Рисунок 1 – Экспорт в SDK
Шаг 2: Подготовка к работе с IP
Для начала убедимся, что мы все правильно настроили. Для этого сделаем новый проект с “Hello World”. Идем File→New→Application Project вводим название, какое хотите, больше ничего не заполняем (Рисунок 2). Нажимаем “Next”, выбираем “Hello World” и нажимаем “Finish”. На отладочной плате MiniZed на преобразователь UART→USB выведен UART1 процессорной системы. Нужно выбрать именно его, для этого идем в папку Hello_bsp (либо ваше название вместо Hello) нажимаем модифицировать BSP (Рисунок 3). Выбираем UART1 (Рисунок 4). Нажимаем “OK”.
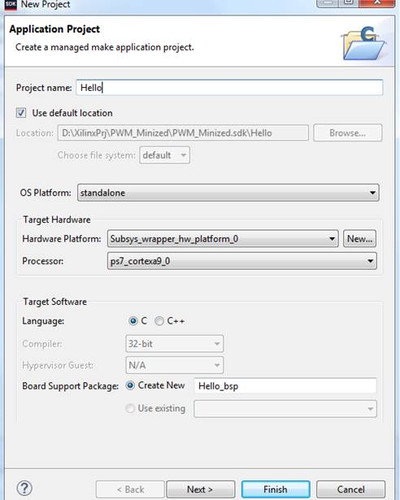
Рисунок 2 – Создаем проект для проверки

Рисунок 3 – Модифицируем BSP
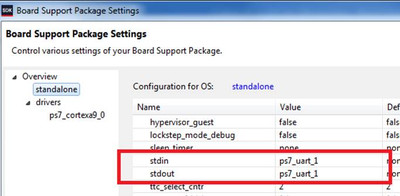
Рисунок 4 – Выбираем UART1
Подключаем отладочную плату к компьютеру. Нажимаем Ctrl + B (Build Project). Идем во вкладку “SDK Terminal” и нажимаем на кнопку добавления порта. В открывшемся окне нужно указать COM порт, к которому подключен USB UART преобразователь и скорость обмена данными (Рисунок 5). Узнать номер порта можно в диспетчере устройств во вкладке COM и LPT.
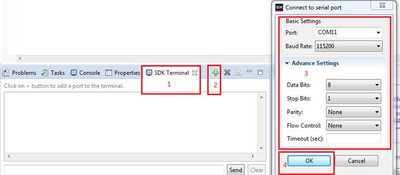
Рисунок 5 – Добавляем соединение и настраиваем параметры
Теперь можно прошить нашу СнК. Идем в меню Run -> Run Configurations. Заполняем как на рисунке (Рисунок 6). Нажимаем “Run”.
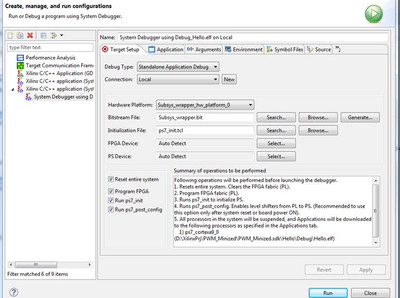
Рисунок 6 – Окно “Run Configurations”
Переключаемся на вкладку “SDK Terminals”. Мы должны увидеть сообщение “Hello World” (Рисунок 7).
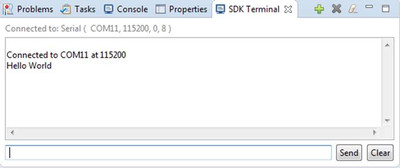
Рисунок 7 – Вывод консоли
Шаг 3: Разработка ПО и запуск на системе c ZYNQ
Открываем файл helloword.c
Добавляем заголовочные файлы, которые нам понадобятся
1. Добавим строку #define PWM_TERMINAL 0. Наше ПО можно будет собрать в двух исполнениях. В первом исполнении управлять яркостью светодиода будем сами, отправляя ему значение рабочего цикла с помощью консоли. Во втором яркость будет меняться от 0 до 100% автоматически (PWM_TERMINAL 0).
Напишем функцию, которая будет инициализировать наш IP-блок в PL части.
2. Функции и типы данных используемые для написания функции инициализации в этом пункте были автоматически сгенерированы Vivado HLS и доступны при подключении заголовочного файла "xpwm_ctrl.h".
3. Дополним main(), используя написанную ранее функцию и API сгенерированное Vivado HLS.
4. Сохраняем файл. При сохранении SDK автоматически пересоберет проект.
Прошиваем нашу СнК, т.к. мы уже настроили параметры запуска при запуске “Hello World”, то можно просто щелкнуть право кнопкой мыши по проекту→Run As→Launch On Hardware (System Debugger) (Рисунок 8). Если вы отключали плату от компьютера, то необходимо заново подключиться в терминале. После прошивки мы должны увидеть, как яркость светодиода изменяется от 0 до 100%. Чтобы менять яркость вручную, нужно пересобрать проект, изменив значение с 0 на 1 для PWM_TERMINAL.
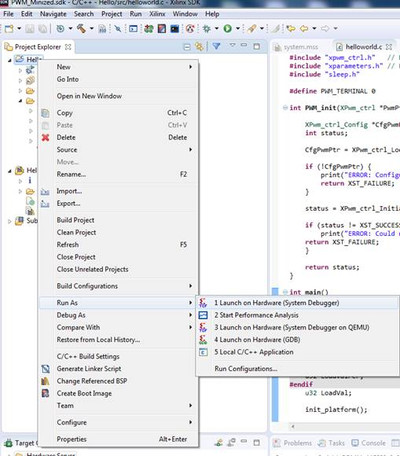
Рисунок 8 – Прошиваем СнК
Вы прочитали третью и заключительную часть по разработке IP-блоков с помощью инструментов высокоуровневого синтеза. В этом цикле был рассмотрен маршрут проектирования в среде VIvado HLS, интеграция разработанных IP-блоков в систему на базе процессорной системы ZYNQ в Vivado и работа с получившейся системой в SDK. Многое не было рассмотрено, но целью не ставилось рассказать обо всем. Целью было показать основные этапы и подход к такой разработке.
1. Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS. Часть 1.
2. Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS. Часть 2.
3. MiniZed™: a single-core Zynq 7Z007S development board
4. Осваиваем Zynq-7000S с бесплатной отладкой: видео
5. Осваиваем Zynq-7000: видеоуроки (доп. ссылка)
6. Добавление MiniZed в Vivado: архив с инструкцией
7. Vivado Design Suite Evaluation and WebPACK // Ссылка
8. UG973. Release Notes, Installation, and Licensing
Скачать статью в формате PDF. Зарегистрируйтесь, это не займет много времени. Статья в формате PDF
Аннотация
Работаем с IP-блоками HLS в Xilinx SDK
Шаг 1: Экспортируем файлы в SDK
Шаг 2: Подготовка к работе с IP
Шаг 3: Разработка ПО и запуск на системе c ZYNQ
Заключение Шаг 2: Подготовка к работе с IP
Шаг 3: Разработка ПО и запуск на системе c ZYNQ
Список литературы
В этой части будут показаны основные шаги необходимые для запуска и работы разработанной в прошлых частях системы [1, 2]. Будет показано, как можно использовать API, которое автоматически генерируется для IP-блоков с интерфейсом AXI4-Lite.
Начнем с экспорта в SDK. Для этого в Vivado идем в меню File→Export→Export Hardware (Рисунок 1). Отмечаем галочку “Include bitstream”. Затем снова идем в меню File→Launch SDK.
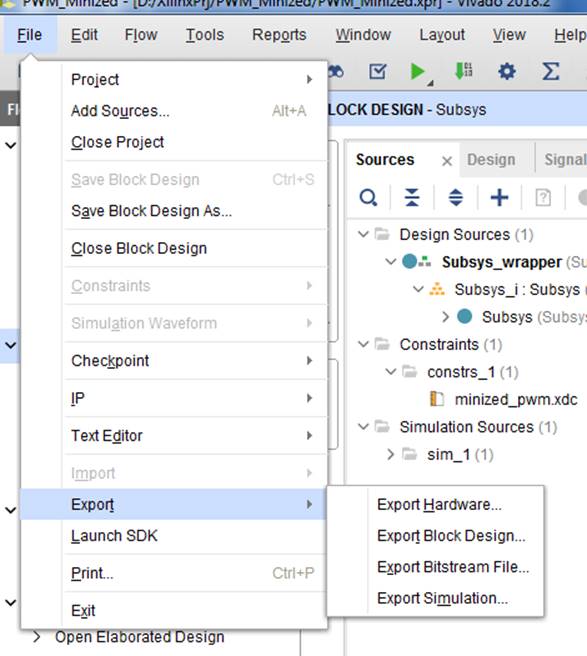
Рисунок 1 – Экспорт в SDK
Шаг 2: Подготовка к работе с IP
Для начала убедимся, что мы все правильно настроили. Для этого сделаем новый проект с “Hello World”. Идем File→New→Application Project вводим название, какое хотите, больше ничего не заполняем (Рисунок 2). Нажимаем “Next”, выбираем “Hello World” и нажимаем “Finish”. На отладочной плате MiniZed на преобразователь UART→USB выведен UART1 процессорной системы. Нужно выбрать именно его, для этого идем в папку Hello_bsp (либо ваше название вместо Hello) нажимаем модифицировать BSP (Рисунок 3). Выбираем UART1 (Рисунок 4). Нажимаем “OK”.
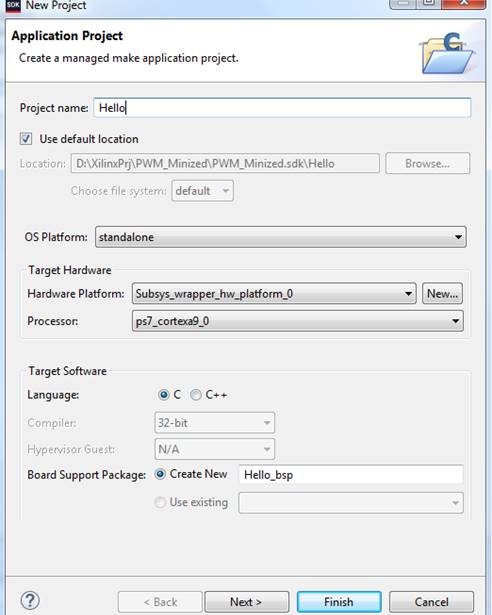
Рисунок 2 – Создаем проект для проверки

Рисунок 3 – Модифицируем BSP

Рисунок 4 – Выбираем UART1
Подключаем отладочную плату к компьютеру. Нажимаем Ctrl + B (Build Project). Идем во вкладку “SDK Terminal” и нажимаем на кнопку добавления порта. В открывшемся окне нужно указать COM порт, к которому подключен USB UART преобразователь и скорость обмена данными (Рисунок 5). Узнать номер порта можно в диспетчере устройств во вкладке COM и LPT.

Рисунок 5 – Добавляем соединение и настраиваем параметры
Теперь можно прошить нашу СнК. Идем в меню Run -> Run Configurations. Заполняем как на рисунке (Рисунок 6). Нажимаем “Run”.
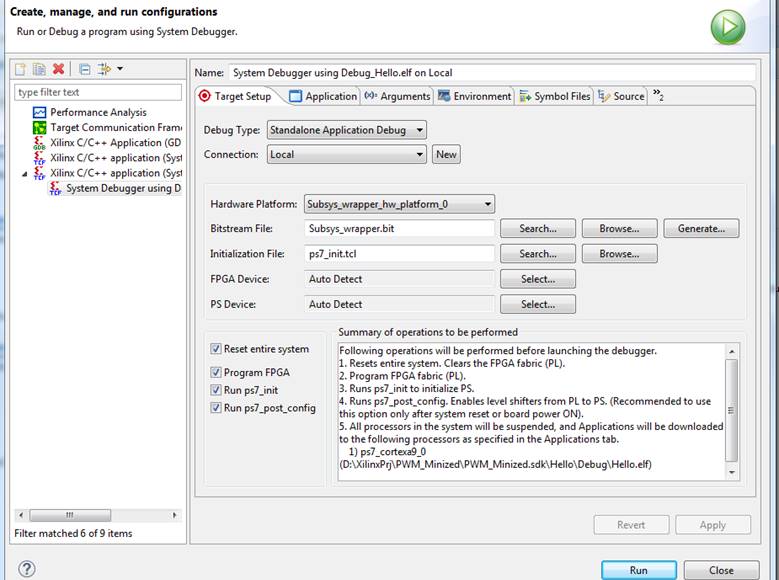
Рисунок 6 – Окно “Run Configurations”
Переключаемся на вкладку “SDK Terminals”. Мы должны увидеть сообщение “Hello World” (Рисунок 7).

Рисунок 7 – Вывод консоли
Шаг 3: Разработка ПО и запуск на системе c ZYNQ
Открываем файл helloword.c
Добавляем заголовочные файлы, которые нам понадобятся
#include <stdio.h>
/*include libraries from Xilinx*/
#include "platform.h"
#include "xpwm_ctrl.h" // Device driver for HLS HW block
#include "xparameters.h" // Parameter definitions for processor peripherals
#include "sleep.h"
/*include libraries from Xilinx*/
#include "platform.h"
#include "xpwm_ctrl.h" // Device driver for HLS HW block
#include "xparameters.h" // Parameter definitions for processor peripherals
#include "sleep.h"
1. Добавим строку #define PWM_TERMINAL 0. Наше ПО можно будет собрать в двух исполнениях. В первом исполнении управлять яркостью светодиода будем сами, отправляя ему значение рабочего цикла с помощью консоли. Во втором яркость будет меняться от 0 до 100% автоматически (PWM_TERMINAL 0).
Напишем функцию, которая будет инициализировать наш IP-блок в PL части.
int PWM_init(XPwm_ctrl *PwmPtr){
XPwm_ctrl_Config *CfgPwmPtr;
int status;
CfgPwmPtr = XPwm_ctrl_LookupConfig(XPAR_XPWM_CTRL_0_DEVICE_ID);
if (!CfgPwmPtr) {
print("ERROR: Configuration failed. DeviceId is not found. \n\r");
return XST_FAILURE;
}
status = XPwm_ctrl_Initialize(PwmPtr, CfgPwmPtr->DeviceId);
if (status != XST_SUCCESS) {
print("ERROR: Could not initialize device.\n\r");
return XST_FAILURE;
}
return status;
}
XPwm_ctrl_Config *CfgPwmPtr;
int status;
CfgPwmPtr = XPwm_ctrl_LookupConfig(XPAR_XPWM_CTRL_0_DEVICE_ID);
if (!CfgPwmPtr) {
print("ERROR: Configuration failed. DeviceId is not found. \n\r");
return XST_FAILURE;
}
status = XPwm_ctrl_Initialize(PwmPtr, CfgPwmPtr->DeviceId);
if (status != XST_SUCCESS) {
print("ERROR: Could not initialize device.\n\r");
return XST_FAILURE;
}
return status;
}
2. Функции и типы данных используемые для написания функции инициализации в этом пункте были автоматически сгенерированы Vivado HLS и доступны при подключении заголовочного файла "xpwm_ctrl.h".
3. Дополним main(), используя написанную ранее функцию и API сгенерированное Vivado HLS.
int main()
{
XPwm_ctrl PWM_CTRL;
int status;
u32 EN = 1;
u32 Rst = 0;
u32 NumOfTicks = 65535/100; //the number of ticks in 1%
#if PWM_TERMINAL
u32 LoadValPer;
#endif
u32 LoadVal;
init_platform();
print("Program to test communication with HLS PWM peripheral in PL\n\r");
//check
status = PWM_init(&PWM_CTRL);
if(status != XST_SUCCESS){
print("HLS peripheral setup failed\n\r");
} else {
print("HLS peripheral check done\n\r");
}
printf("XPwm_ctrl_IsReady = %x\n\r", XPwm_ctrl_IsReady(&PWM_CTRL));
XPwm_ctrl_Set_EN_V(&PWM_CTRL, EN); //enable counter
XPwm_ctrl_Set_Rst_V(&PWM_CTRL, Rst);//assert soft rst to low
while(1){
#if PWM_TERMINAL
print("Enter Duty cycle in percents \n\r");
scanf("%d", &LoadValPer);
LoadVal = LoadValPer*NumOfTicks; //get the number of ticks
printf("LoadVal = %d\n\r", LoadVal);
XPwm_ctrl_Set_LoadValCnt_V(&PWM_CTRL, LoadVal);
#else
for(int i = 0; i<=100; i++){
printf("LoadVal = %d\n\r", i);
XPwm_ctrl_Set_LoadValCnt_V(&PWM_CTRL, i*NumOfTicks);
usleep(100000); //0.1 second delay
}
#endif
}
cleanup_platform();
return 0;
}
{
XPwm_ctrl PWM_CTRL;
int status;
u32 EN = 1;
u32 Rst = 0;
u32 NumOfTicks = 65535/100; //the number of ticks in 1%
#if PWM_TERMINAL
u32 LoadValPer;
#endif
u32 LoadVal;
init_platform();
print("Program to test communication with HLS PWM peripheral in PL\n\r");
//check
status = PWM_init(&PWM_CTRL);
if(status != XST_SUCCESS){
print("HLS peripheral setup failed\n\r");
} else {
print("HLS peripheral check done\n\r");
}
printf("XPwm_ctrl_IsReady = %x\n\r", XPwm_ctrl_IsReady(&PWM_CTRL));
XPwm_ctrl_Set_EN_V(&PWM_CTRL, EN); //enable counter
XPwm_ctrl_Set_Rst_V(&PWM_CTRL, Rst);//assert soft rst to low
while(1){
#if PWM_TERMINAL
print("Enter Duty cycle in percents \n\r");
scanf("%d", &LoadValPer);
LoadVal = LoadValPer*NumOfTicks; //get the number of ticks
printf("LoadVal = %d\n\r", LoadVal);
XPwm_ctrl_Set_LoadValCnt_V(&PWM_CTRL, LoadVal);
#else
for(int i = 0; i<=100; i++){
printf("LoadVal = %d\n\r", i);
XPwm_ctrl_Set_LoadValCnt_V(&PWM_CTRL, i*NumOfTicks);
usleep(100000); //0.1 second delay
}
#endif
}
cleanup_platform();
return 0;
}
4. Сохраняем файл. При сохранении SDK автоматически пересоберет проект.
Прошиваем нашу СнК, т.к. мы уже настроили параметры запуска при запуске “Hello World”, то можно просто щелкнуть право кнопкой мыши по проекту→Run As→Launch On Hardware (System Debugger) (Рисунок 8). Если вы отключали плату от компьютера, то необходимо заново подключиться в терминале. После прошивки мы должны увидеть, как яркость светодиода изменяется от 0 до 100%. Чтобы менять яркость вручную, нужно пересобрать проект, изменив значение с 0 на 1 для PWM_TERMINAL.
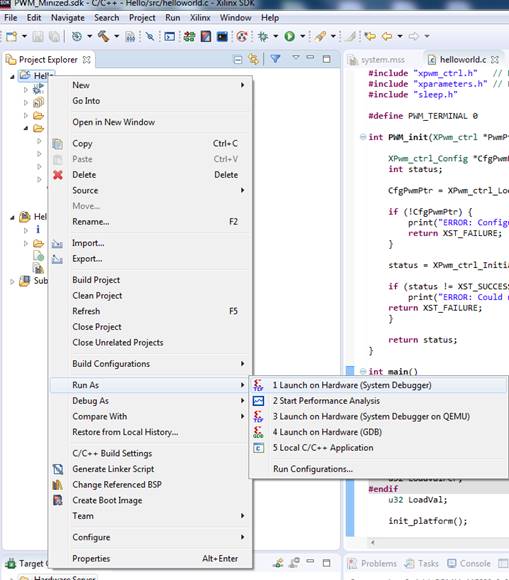
Рисунок 8 – Прошиваем СнК
1. Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS. Часть 1.
2. Разработка IP-блока с помощью инструментов высокоуровнего синтеза: HLS. Часть 2.
3. MiniZed™: a single-core Zynq 7Z007S development board
4. Осваиваем Zynq-7000S с бесплатной отладкой: видео
5. Осваиваем Zynq-7000: видеоуроки (доп. ссылка)
6. Добавление MiniZed в Vivado: архив с инструкцией
7. Vivado Design Suite Evaluation and WebPACK // Ссылка
8. UG973. Release Notes, Installation, and Licensing
Скачать статью в формате PDF. Зарегистрируйтесь, это не займет много времени. Статья в формате PDF