Интерфейсы :: SPI :: Часть 2:: Варианты реализации




Оглавление
Скачать файлы презентации и статью в формате PDF
Скачать файлы презентации и статью в формате PDF
Здравствуйте друзья. C вами проект FPGA-systems.ru.
Продолжаем работу над проектом по развёртыванию интерфейса SPI на ПЛИС. Сегодня мы с Вами обсудим варианты реализации интерфейса.
Доступные ресурсы ПЛИС
Внутри ПЛИС имеется несколько базовых компонентов, которые могут быть использованы для организации интерфейса SPI, что приводит нас к тому, что нам следует определиться каким именно способом мы будем реализовывать интерфейс и какие элементы ПЛИС при этом мы будем задействовать.
Итак, давайте для начала изучим документацию на выбранный нами ранее АЦП и посмотрим, какие варианты построения интерфейса могут быть для него использованы. Напомню, что в первой части мы выбрали недорогой АЦП с интерфейсом SPI: MCP3201.
Обратимся непосредственно к временной диаграмме интерфейса. Мы с Вами видим, что АЦП управляется двумя сигналами: Chip Select и CLK. Отсчёты оцифрованного аналогового сигнала выходят через выход Dout АЦП в последовательном виде в формате MSB, то есть первым передается старший байт.
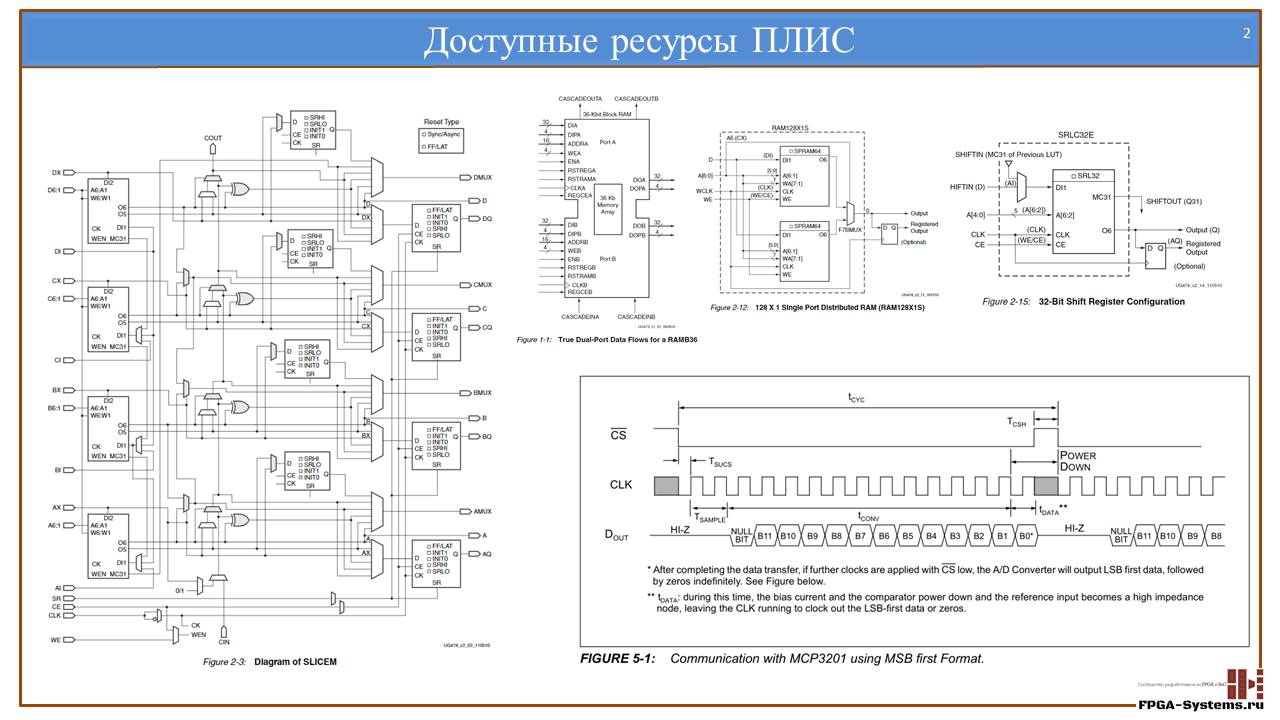
Наша задача состоит в том, что бы эту временную диаграмму повторить, соблюдая при этом все указанные на ней временные интервалы.
Давайте теперь подумаем, а какие у нас есть инструменты и средства, чтобы это сделать.
Существует множество вариантов формирования управляющих сигналов, которые ограничены лишь Вашей фантазией. Приведем некоторые из них.
Варианты реализации интерфейса SPI
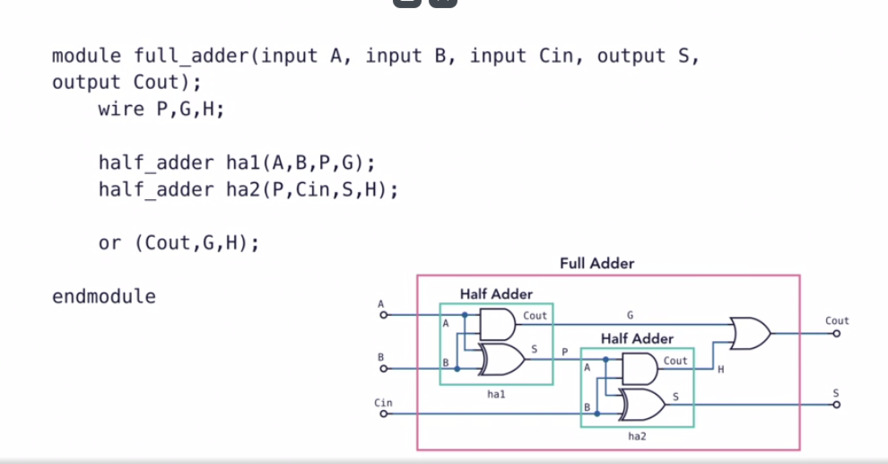
Вариант №1: Конечный автомат
Первый вариант может быть основан на построении конечного автомата, в состояниях которого формируются соответствующие сигналы управления.
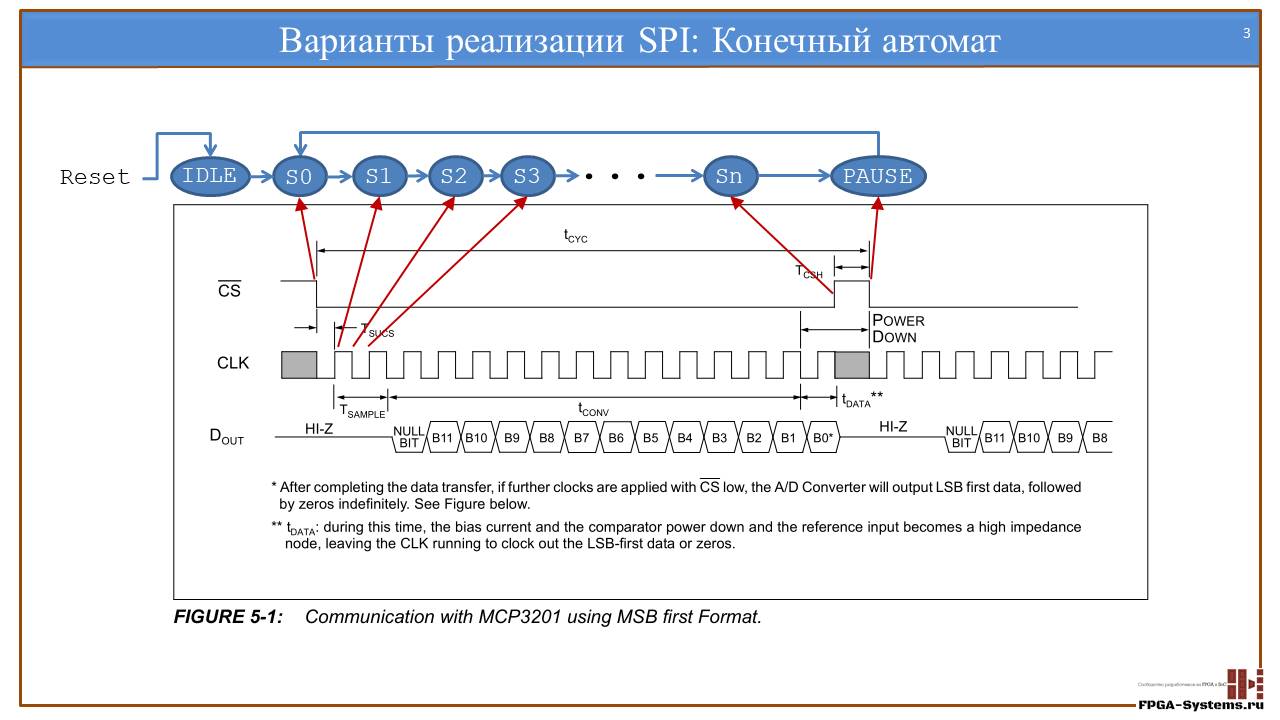
Такой подход позволит нам пошагово воспроизвести временную диаграмму, и при этом потребует от нас знаний описания конечного автомата как такового, и, возможно, некоторых более глубоких знаний. Например, стилей описания конечного автомата: один, двух или трех процессный, задания вариантов кодирования состояния конечного автомата: binary, gray, one-hot и др. Но с большой долей вероятности данные знания нам не пригодятся, и мы сможем без проблем разработать конечный автомат.
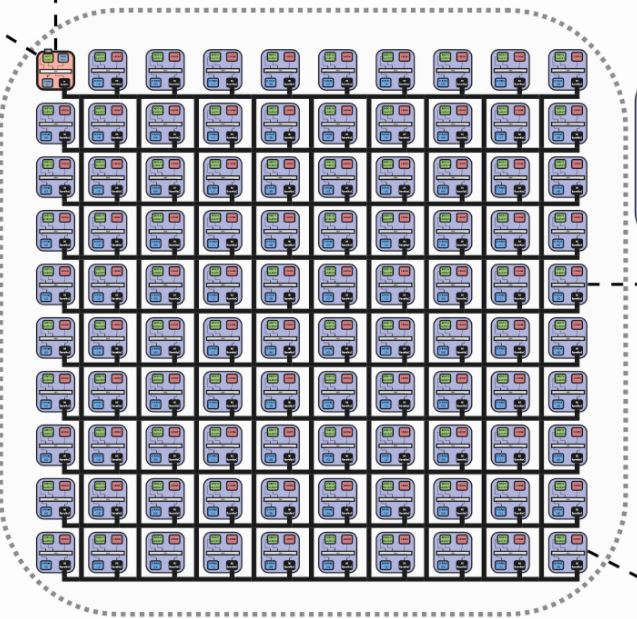
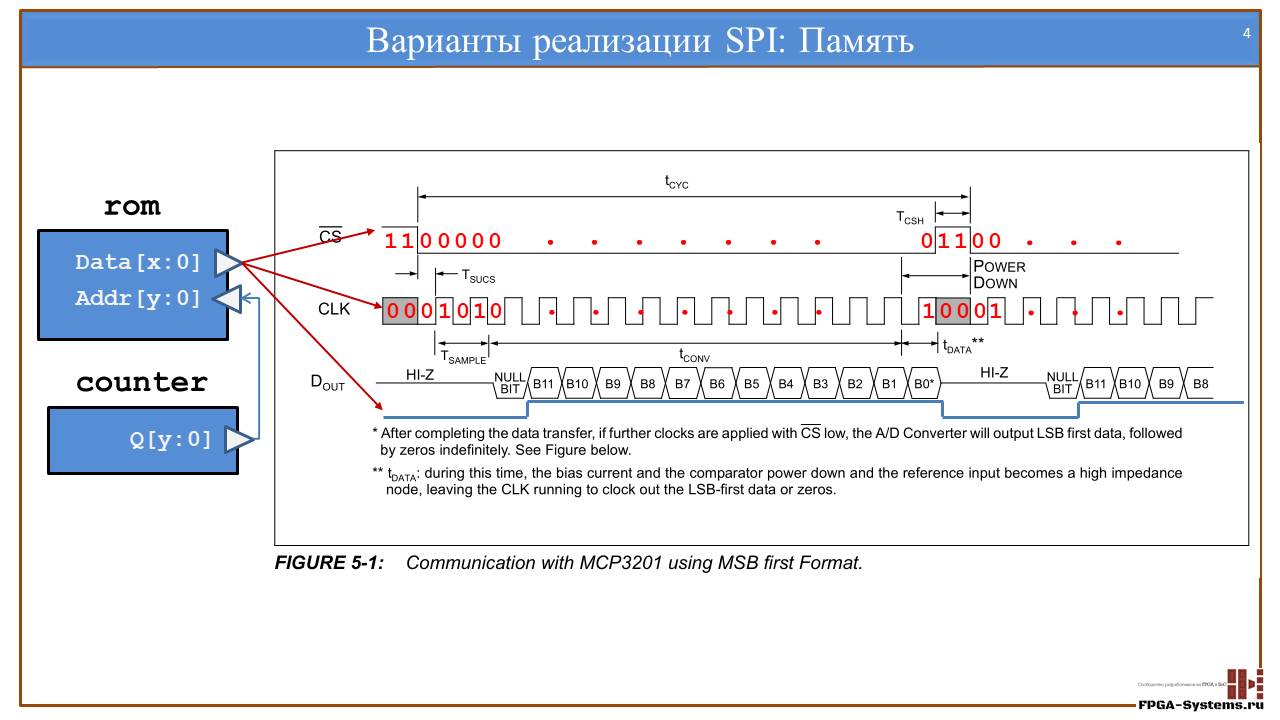
Вариант №2: Память
Поскольку наши сигналы управления задаются в виде определенно заданной последовательности, которая не меняется от отсчёта к отсчёту, то мы можем создать память, в которую будут занесены значения управляющих сигналов. Используя лишь только тактовый сигнал и счетчик адреса мы сможем последовательно формировать состояния управляющих сигналов. В виду малого размера последовательности мы можем разместить ее в распределённой памяти ПЛИС, а не в блочной, что было бы достаточно расточительно.
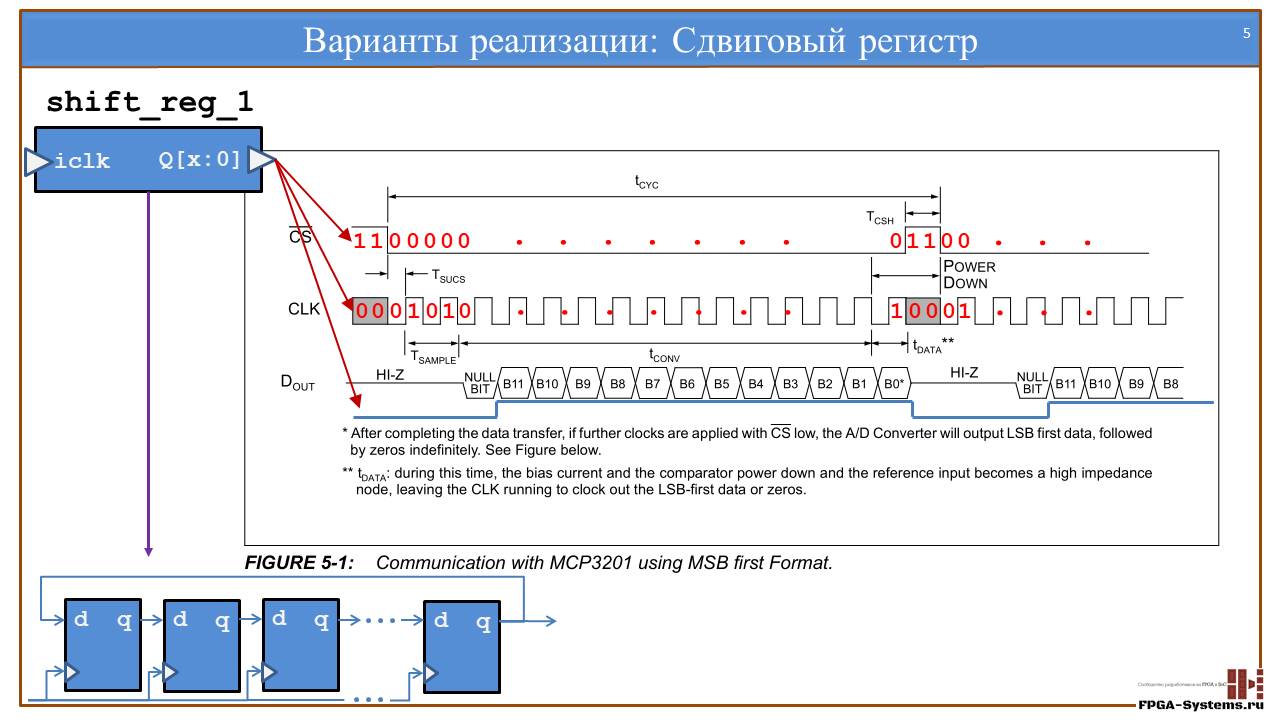
Вариант №3: Сдвиговый регистр
Также вместо памяти и счетчика адреса мы можем использовать зацикленный сдвиговый регистр, значения которого инициализируются необходимой нам последовательностью. В таком подходе нам не нужно формировать значение адреса, поскольку нет памяти, а последовательность циклически повторяется и перезаписывает сама себя. Сдвиговый регистр можно выполнить как на отдельно взятых триггерах, так и на специализированных ресурсах SRL, что позволит сделать разрабатываемый модуль крайне компактным
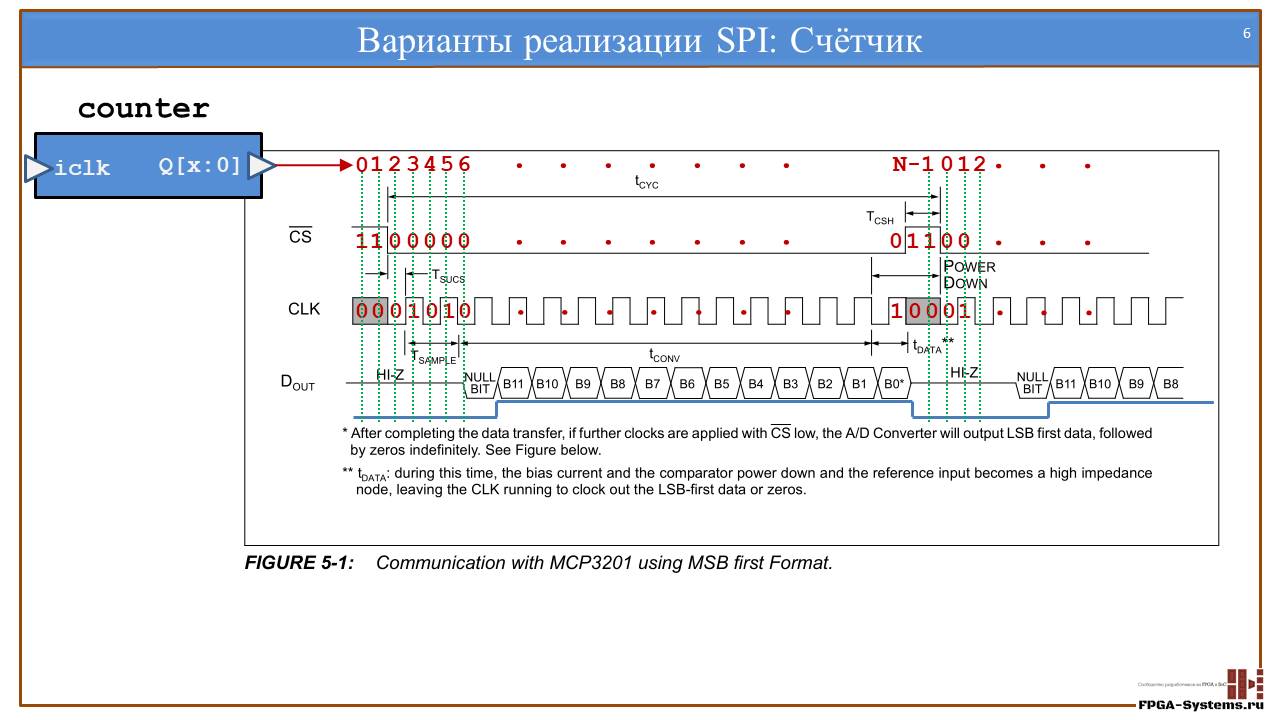
Вариант №4: Счётчик
Мы можем попробовать использовать простой счётчик, значения сигналов управления мы сможем контролировать, основываясь на значениях счётчика.
Мы будем разрабатывать код для определённого АЦП и не будем делать наш модуль SPI максимально универсальным, поскольку это потребует более глубоких знаний интерфейса SPI. К тому же разные производители могут изменять временные характеристики интерфейса, количество передаваемых данных, время отклика и т.д. В виду такого большого разброса параметров гораздо удобнее будет сделать интерфейс под конкретную микросхему, в нашем случае это MCP3201. К тому же это не займет много времени да и как часто Вам приходится менять один АЦП на другой?
Предлагаемые решения вполне универсальны и позволят Вам без особых временных затрат переделать модуль под другие периферийные устройства с интерфейсом SPI.
Преобразование данных с АЦП
Преобразование последовательного формата значения отсчёта оцифрованного сигнала в параллельный мы возложим на обычный сдвиговый регистр. В виду того, что данные с АЦП приходят не сразу, а имеют пустой бит и определённую временную задержку, мы сформируем дополнительный сигнал разрешения, который будет являться комбинацией сигналов CLK и дополнительного сигнала валидности данных с АЦП (показанного синей линией), который мы также сформируем самостоятельно. Не стоит забывать и о сигнале готовности преобразования последовательного формата значения отсчёта в параллельный.

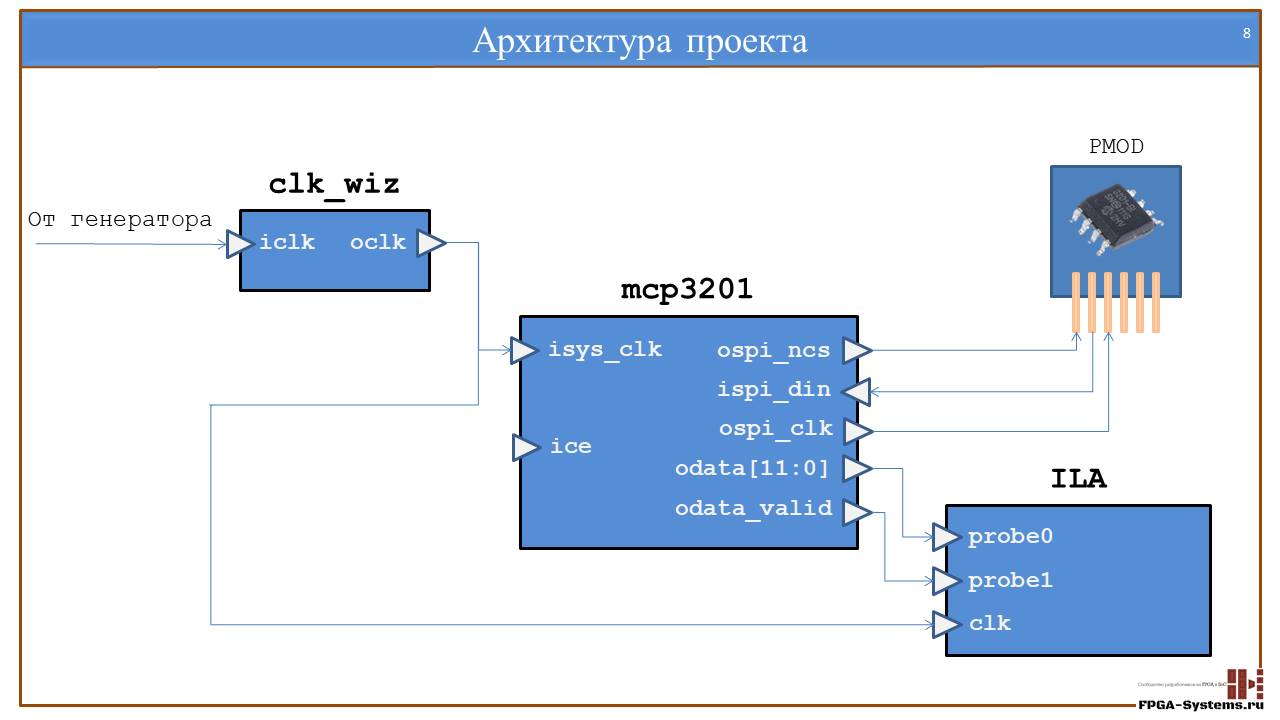
Архитектура проекта
Подводя итог вышесказанному, продумаем архитектуру проекта. Она должна содержать:
- формирователь системной тактовой частоты clk_wiz
- модуль управления АЦП mcp3201 (название модуля соответствует подключаемому АЦП)
- интегрированный логический анализатор ILA, который будет собирать считанные данные с АЦП в некоторый массив. Затем этот массив будет передан по JTAG в на компьютер в Vivado для его отображения на экране.
Однако следует учесть еще один не маловажный фактор. Он состоит в значении рабочей частоты АЦП и частоты, которую может сгенерировать модуль clk_wiz.
Аппаратное ограничение
Обратимся вновь к временной диаграмме и таблице параметров АЦП. Как мы видим указаны значения для напряжения питания 5В и 2.7В. Давайте будем ориентироваться на параметры при питании 2.7В, поскольку напряжение получаемое с PMOD равно 3.3В. При таком напряжении питания, частота следования тактовых импульсов СLK не должна превышать 0.8 МГц. Это в свою очередь приводит нас к тому, что мы будем вынуждены поставить блок деления системной тактовой частоты.
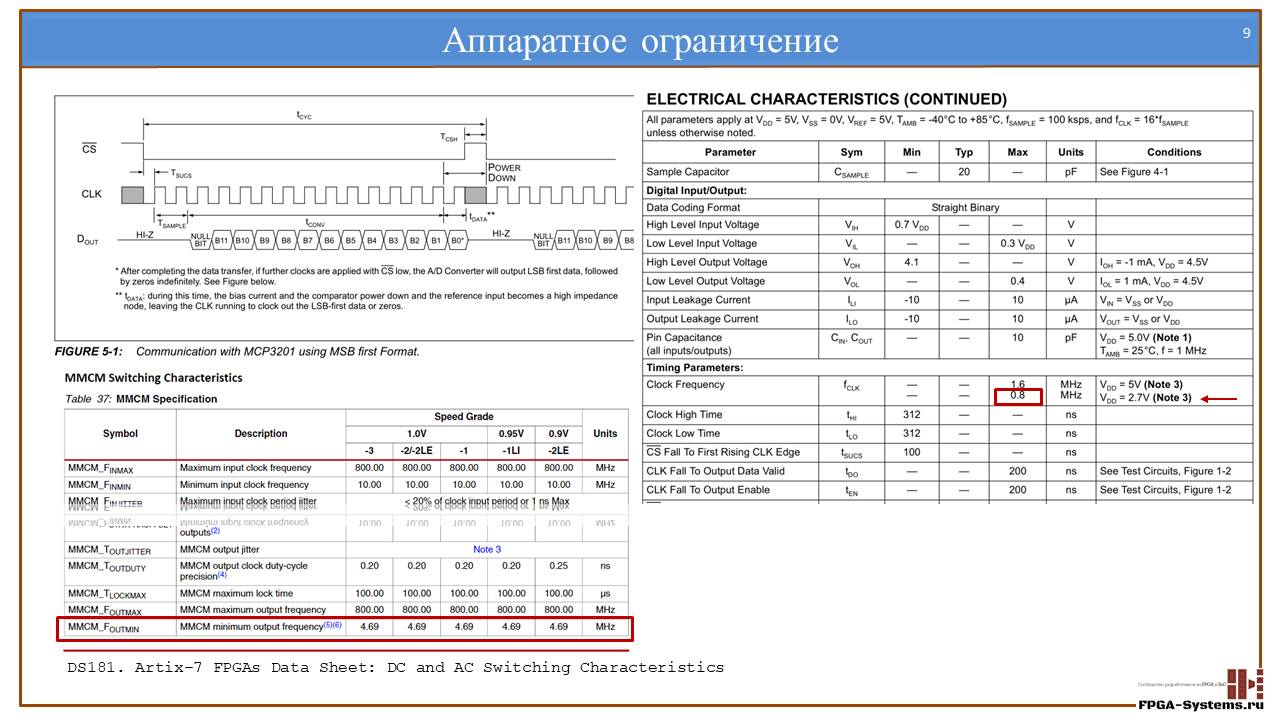
Его наличие будет необходимо нам по той причине, что PLL или MMCM 7-го семейства ПЛИС Xilinx имеют минимальную частоту, которую они смогут сгенерировать. Согласно документации на ПЛИС (DS181) она составляет примерно 5МГц. Устанавливая этот модуль и задавая необходимый для нас коэффициент деления системной тактовой частоты, мы добьемся корректных значений временных интервалов для формируемых сигналов управления АЦП.
Окончательная архитектура проекта
Теперь полная схема проекта и подключения модулей будет выглядеть следующим образом.
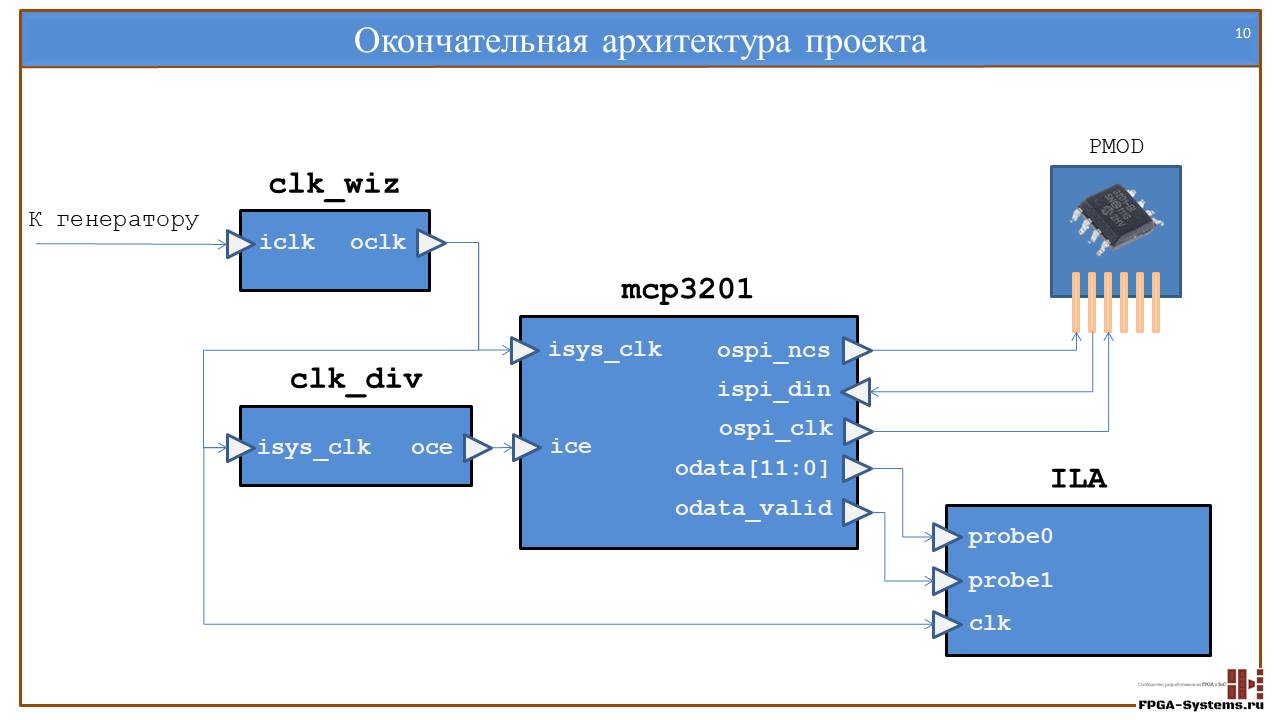
Сам модуль управления АЦП mcp3201 имеет следующие порты ввода/вывода:
- isys_clk – системный тактовый сигнал, генерируемый модулем clk_wiz
- ice – вход разрешения системной тактовой частоты
- ispi_din - вход данных от АЦП
- ospi_clk – тактовый сигнал интерфейса SPI для АЦП
- ospi_ncs – сигнал управления chip select
- odata[11 : 0] – 12битное значение отсчёта сигнала, оцифрованного АЦП
- odata_valid – сигнал валидности принятого отсчёта
Заключение
На этом наше обсуждение вариантов реализации и архитектуры проектов законченно. В следующей части мы приступим к разработке кода на языках VHDL и Verilog. А для того, чтобы
не пропустить выход следующего видео или статьи, не забудьте подписаться на наш канал и присоединиться к нам в соц сетях и чату в telegram.
Также нам интересно узнать, какие варианты реализации Вам интересны или какие Вы уже использовали на практике. Не забудьте написать об этом в комментариях.
До встречи в следующей части.
Скачать файлы презентации и статью в формате PDF
Скачать файлы презентации и статью в формате PDF
Не забудьте присоединиться к нам в соцсетях ![]()

![]()