Основы статического временного анализа. Часть 6: Multicycle Path Constraint.



Оглавление
- Введение
- 1. Пересечение тактовых доменов
- 2. Изменение положения защелкивающего фронта
- 3. Изменение положения запускающего фронта
- 4. Сдвиг фазы тактового сигнала
- 5. Работа модуля по строб-сигналу
- 6. Ограничения для входных и выходных сигналов
- Заключение
- Ссылки
*О найденных опечатках и замечаниях просим сообщить admin@fpga-systems.ru
Введение.
Данная работа завершает серию статей по временным ограничениям в FPGA. В статье продемонстрирована возможность изменения положения запускающих и защёлкивающих фронтов при передаче данных между тактовыми доменами. Показаны несколько практических примеров использования команды set_multicycle_path.
1. Пересечение тактовых доменов.
В предыдущей статье [1] был представлен временной анализ передачи данных при пересечении тактовых доменов (Clock Domain Cross) и рассмотрено применение команды set_false_path. Так как временные соотношения между фронтами асинхронных тактовых сигналов неизвестны, для них невозможно корректно провести временной анализ. Единственный способ избежать проблем, связанных с метастабильностью – исключить пути между доменами из временного анализа и добавить синхронизаторы.
В случае синхронных доменов все задержки детерминированы и известны, поэтому анализатор может провести точные расчеты. Если все временные ограничения будут выполнены, то можно гарантировать корректность передачи данных. Однако, бывают ситуации, когда из-за определенного соотношения между частотами и фазами тактовых сигналов ограничения оказываются трудновыполнимыми, что приводит к их дальнейшему нарушению.
В этом случае можно, как и для асинхронных доменов, добавить синхронизатор и исключить путь из временного анализа. Этот способ требует дополнительных ресурсов, которые будут потрачены на реализацию синхронизатора. Другим решением является изменение правил выполнения временного анализа. Можно модифицировать способ сопоставления запускающих и защелкивающих фронтов между собой, тем самым ослабляя временные ограничения. Рассмотрим, как это можно сделать.
На рисунке 1 показан путь, на который нанесены задержки для данных и тактовых сигналов. Чтобы гарантировать синхронность тактовых сигналов, они формируются внутри FPGA с помощью PLL. Передающий триггер FF1 тактируется сигналом clk_1, а приёмный триггер FF2 – сигналом clk_2.
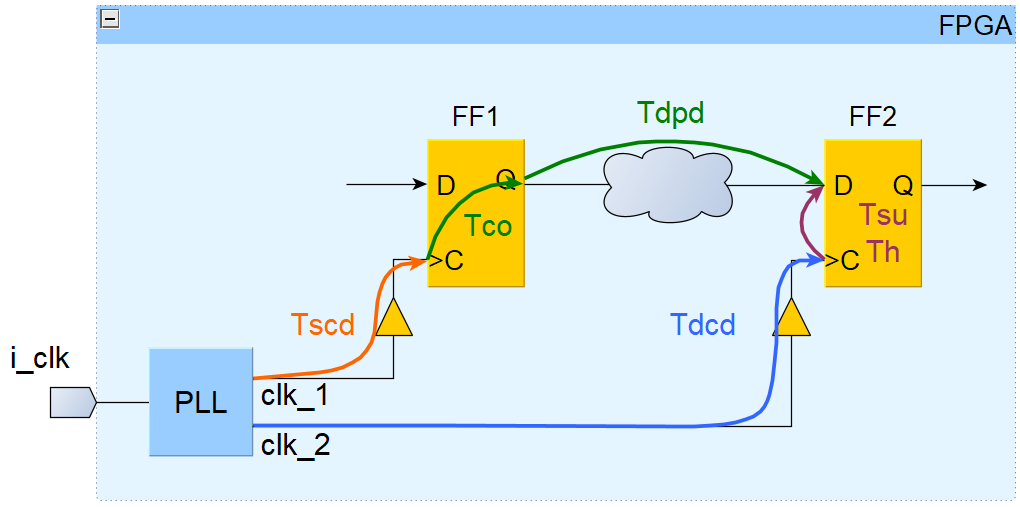
Рисунок 1. Путь с задержками для данных и тактовых сигналов.
Ниже даны определения задержек, представленных на рисунке 1.
• Tscd (Source Clock Delay) – задержка запускающего тактового сигнала от выхода clk_1 PLL до тактового входа триггера FF1;
• Tdcd (Destination Clock Delay) – задержка защелкивающего тактового сигнала от выхода clk_2 PLL до тактового входа триггера FF2;
• Tco (Clock to Output) – интервал времени между приходом фронта на тактовый вход триггера и появлением данных на его выходе Q;
• Tdpd (Data Propagation Delay) – задержка распространения данных по соединениям и через комбинационную логику;
• Tsu (SetUp time) – время установки защелкивающего триггера;
• Th (Hold time) – время удержания защелкивающего триггера.
Временной анализ для пути на рисунке 1 проводится тем же способом, что и в [1], поэтому сразу запишем уравнения для Slack:

где ΔTsu и ΔTh – интервалы времени между появлением запускающего фронта clk_1 и защелкивающего фронта clk_2 на выходе PLL при анализе по Setup и Hold соответственно:

В уравнениях для Slack величины слагаемых ΔTsu и ΔTh должны рассчитываться исходя из взаимного расположения фронтов тактовых сигналов clk_1 и clk_2. Напомним, каким образом анализатор получает эти значения [2]. В качестве примера будем считать, что период сигнала clk_1 равен 3 нс, а период clk_2 – 4 нс. Также пусть в нулевой момент времени формируются фронты обоих тактовых сигналов (см. рисунок 2).
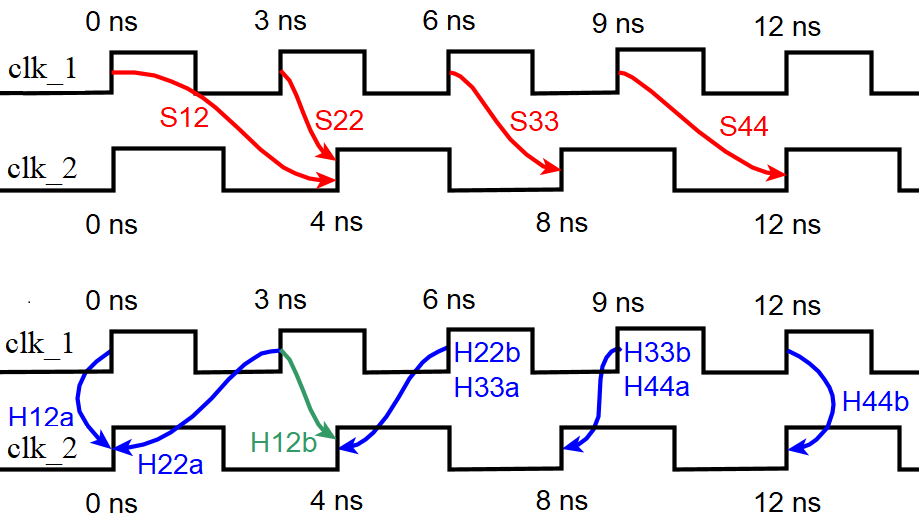
Рисунок 2. Диаграммы сигналов для временного анализа.
Для начала каждый фронт сигнала clk_1 рассматривается в качестве запускающего, и ему сопоставляется соответствующий защелкивающий фронт сигнала clk_2. По умолчанию выбирается ближайший фронт clk_2, который следует после запускающего фронта clk_1. На рисунке 2 полученные пары фронтов обозначены как S12, S22, S33 и S44. Для каждой пары по формуле (1) рассчитывается величина ΔTsu. В уравнение для Slack слагаемое ΔTsu входит с положительным знаком, поэтому в дальнейшем для временного анализа выбирается пара фронтов с минимальным значение ΔTsu, что соответствует самому пессимистичному случаю. В нашем примере это пара S22, для которой ΔTsu = 1 нс.
Далее временной анализатор вычисляет значение ΔTh. Для этого для каждой пары фронтов, полученной при расчете ΔTsu, проверяются два условия [2]:
a) данные, которые передаются по запускающему фронту clk_1 не должны быть приняты фронтом clk_2, который является предыдущим по отношению к текущему защелкивающему фронту clk_2;
b) данные, которые передаются фронтом clk_1, следующим после запускающего, не должны быть приняты текущим защелкивающим фронтом clk_2.
Для нашего примера эти условия изображены на рисунке 2 в виде синих стрелок. Например, для пары S22 первому условию соответствует стрелка H22a. Запускающий фронт clk_1 начинает передачу данных в момент времени 3 нс. Эти данные не должны быть защелкнуты предыдущим фронтом clk_2, который появляется также в нулевой момент времени. Второму условию для пары S22 соответствует стрелка H22b. Следующий фронт clk_1 после запускающего появляется в момент времени 6 нс и начинает новую передачу данных. Эти данные не должны быть приняты текущим защелкивающим фронтом из пары S22.
Для каждого условия по формуле (1) вычисляется значение ΔTh. Например, рассматривая пару фронтов S22, для условия H22а получаем, что ΔTh = –3 нс, а для H22b – ΔTh = –2 нс. Временной анализатор рассчитывает величины ΔTh для всех условий, показанных синими стрелками на рисунке 2. Самому пессимистичному случаю при анализе по Hold соответствует максимальное значение ΔTh, так как в уравнение для Slack это слагаемое входит с отрицательным знаком. Для нашего примера значение ΔTh равно нулю, что соответствует условию H12a.
Обратите внимание, что на рисунке 2 условие H12b для пары S12 обозначено зеленым цветом. Данные запущенные фронтом clk_1 в момент времени 3 нс не должны быть приняты фронтом clk_2, который появляется в момент времени 4 нс. Для этого условия получаем, что ΔTh = 4 – 3 = 1 нс, что является максимальными значением и соответствует самому пессимистичному случаю. Однако, условие H12b не согласуется с условием S22, которое говорит, что в момент времени 4 нс данные как раз должны быть приняты фронтом clk_2. Из-за этого противоречия временной анализатор в дальнейшем не рассматривает условие H12b и использует значение ΔTh, равное нулю.
Проверим проведенные выше рассуждения на практике и рассмотрим простой проект, в котором присутствует два тактовых домена. Для простоты пусть каждый домен состоит всего из одного триггера. На рисунке 3 показаны настройки PLL, а на рисунке 4 – схема проекта.
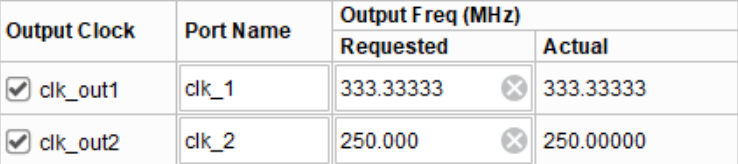
Рисунок 3. Настройки PLL.
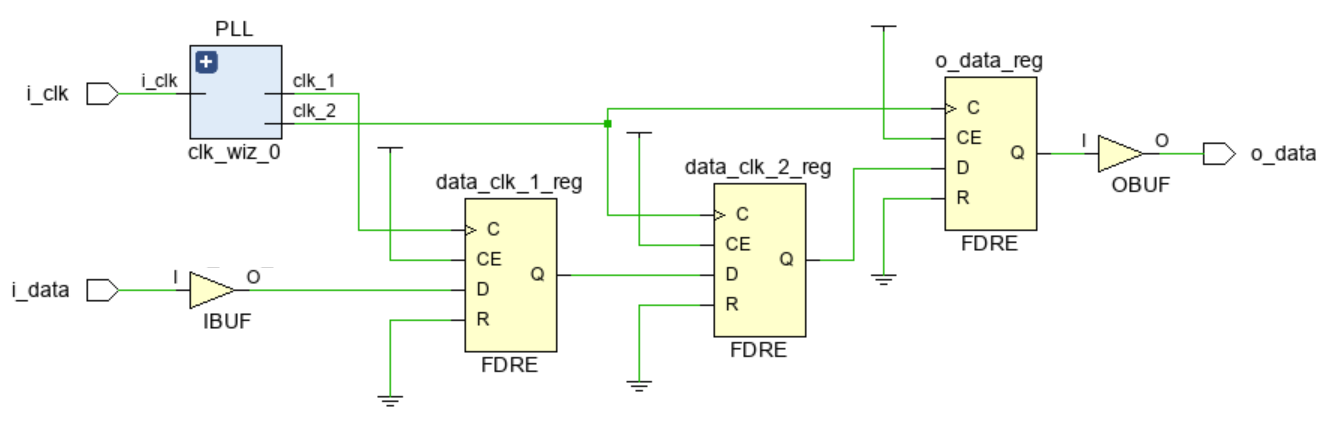
Рисунок 4. Схема проекта.
Описание на SystemVerilog представлено ниже:
|
На ножку FPGA приходит тактовый сигнал i_clk с периодом 10 нс, из которого с помощью PLL формируются два сигнала clk_1 и clk_2. Добавим в xdc-файл следующие команды:
|
Временному анализатору с помощью команды create_clock необходимо указать период сигнала i_clk. Зная его, а также учитывая настройки PLL, анализатор самостоятельно определит периоды сигналов clk_1 и clk_2. Как и в [1], используя команду create_generated_clock с ключом -name, заменим автоматически сгенерированные имена сигналов на выходе PLL на более простые.
На рисунке 5 показан раздел Summary временного отчета для пути между тактовыми доменами при анализе по Setup. Из строки Requirement можно увидеть, что запускающий фронт появляется в момент времени 3 нс, а защелкивающий – в 4 нс. Значение ΔTsu равно 1 нс, что соответствует паре фронтов S22 на рисунке 2.
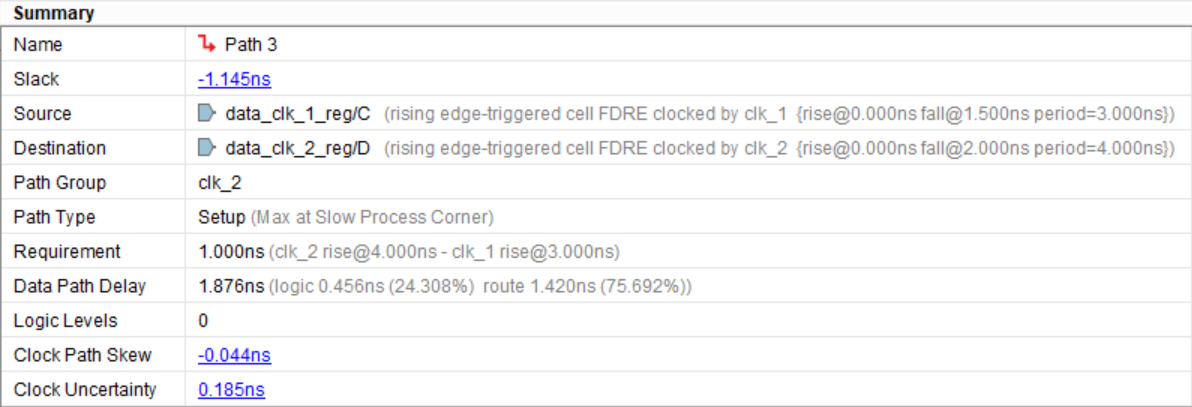
Рисунок 5. Раздел Summary временного отчета для анализа по Setup.
На рисунке 6 представлен раздел Summary для анализа по Hold. Из строки Requirement получаем, что и запускающий, и защелкивающий фронты формируются в нулевой момент времени. На рисунке 2 это соответствует условию H12a.
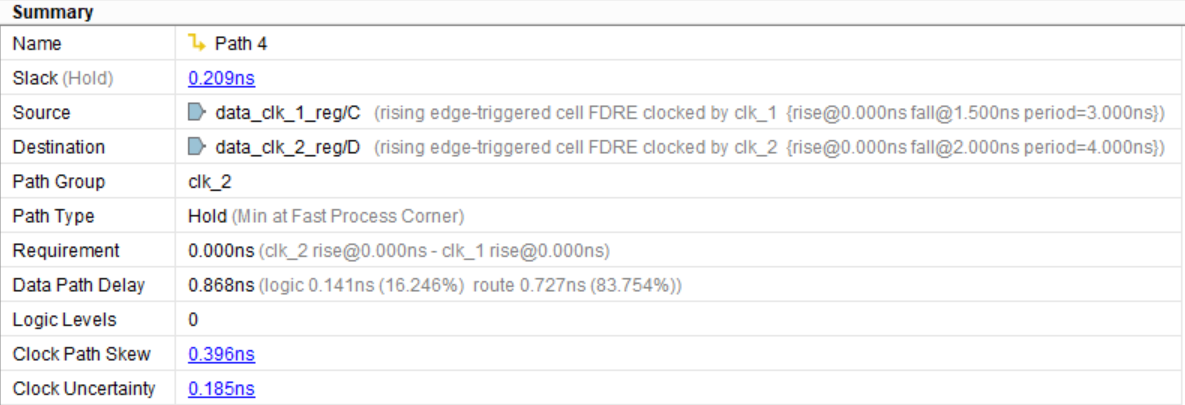
Рисунок 6. Раздел Summary временного отчета для анализа по Hold.
Из-за того, что интервал времени между появлением фронтов из пары S22 равен всего 1 нс, мы получили трудновыполнимое ограничение при анализе по Setup. Как можно увидеть из рисунка 5, оно нарушается, и данные опаздывают на 1.145 нс.
2. Изменение положения защелкивающего фронта.
Как отмечалось ранее, при формировании пар фронтов тактовых сигналов для анализа по Setup каждому запускающему фронту сигнала clk_1 сопоставляется ближайший по времени защелкивающий фронт сигнала clk_2. Для временного анализатора это правило обозначается, как Setup = 1. Его можно модифицировать для конкретного пути с помощью команды set_multicycle_path. Например, можно сдвинуть положение защелкивающего фронта на один период сигнала clk_2. Добавим в xdc-файл следующую команду:
|
С помощью ключей -from и -to задается путь, для которого изменяются правила временного анализа. Ключ -setup говорит, что модификации вносятся в анализ по Setup, а ключ -end – что изменяется положение защелкивающего фронта. Число 2 обозначает, что новое правило для анализа выглядит, как Setup = 2.
Начало и конец пути можно также задавать через триггеры с помощью команды get_cells или через тактовые сигналы, используя команду get_clocks:
|
Временная диаграмма с обновленным положением фронтов представлена на рисунке 7. Позиции всех защелкивающих фронтов сдвинулись вправо на один период по сравнению со случаем без команды set_multicycle_path (см. рисунок 2). Самым пессимистичная ситуация по-прежнему соответствует паре фронтов S22, но теперь ΔTsu равно 8 – 3 = 5 нс.
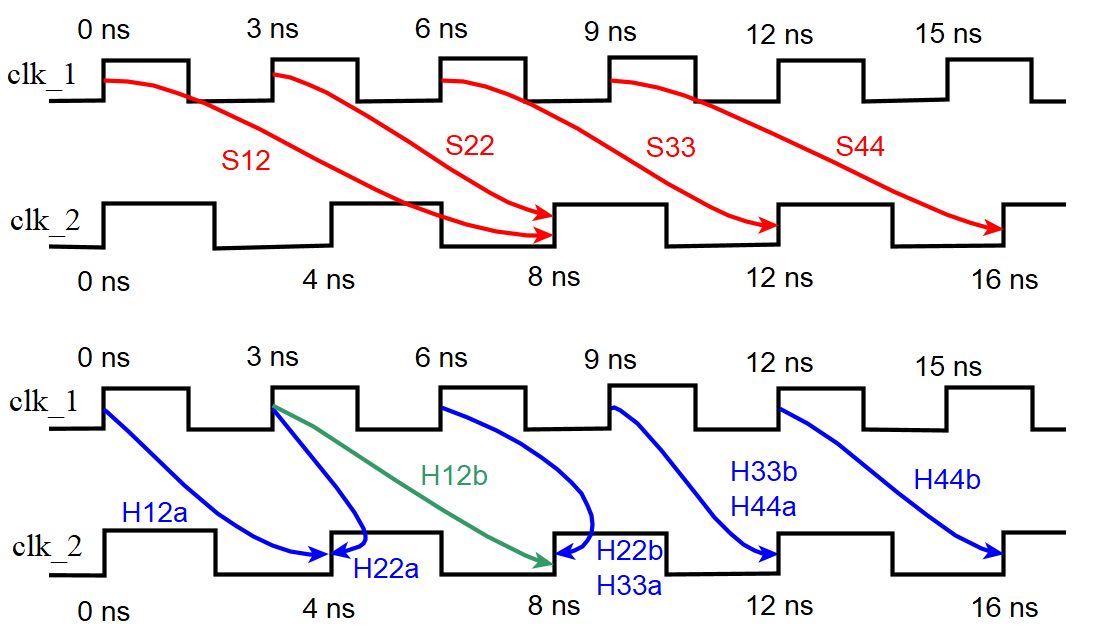
Рисунок 7. Диаграммы сигналов для временного анализа.
Так как условия для анализа по Hold привязаны к парам фронтов, полученным на этапе вычисления ΔTsu, их защелкивающие фронты также смещаются. Например, условие H12a обозначает, что данные запущенные в нулевой момент времени не должны быть приняты фронтом clk_2, который предшествует защелкивающему. Это соответствует моменту времени 4 нс, так как защелкивающий фронт для пары S12 теперь появляется в 8 нс.
Для анализа по Hold будет использоваться условие H12a, для которого ΔTh = 4 – 0 = 4 нс. Условие H12b игнорируется из-за конфликта с требованиями для пары S22 при анализе по Setup.
Ниже показаны обновленные разделы Summary временного отчета. На рисунке 8 можно увидеть, что при анализе по Setup (Requirement) защелкивающий фронт сигнала clk_2 появляется в момент времени 8 нс, а запускающий фронт сигнала clk_1 – в 3 нс. Это полностью согласуется с фронтами S22 на рисунке 7.
Также обратите внимание на строку Timing Exceptions, которая указывает, что правила временного анализа были изменены с помощью команды set_multicycle_path.
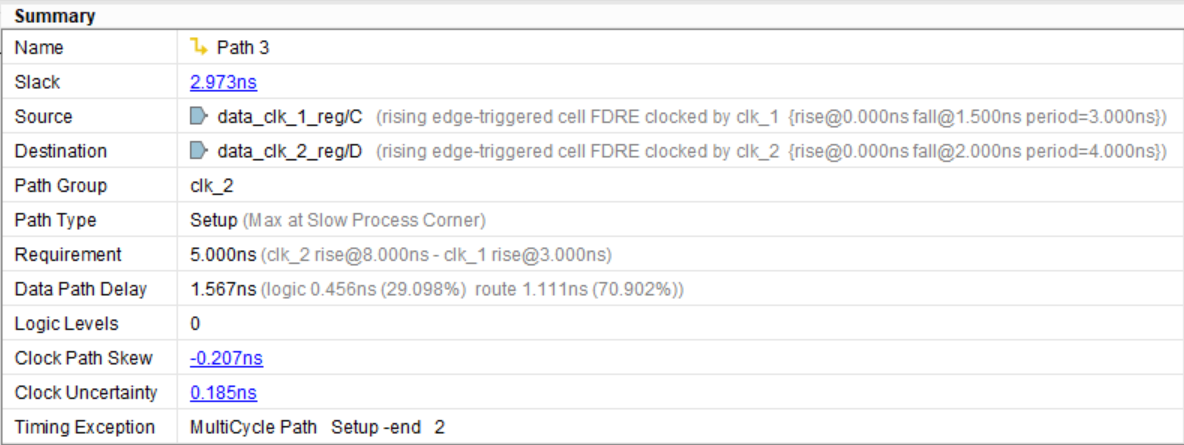
Рисунок 8. Раздел Summary временного отчета для анализа по Setup.
При анализе по Hold рассматривается условие H12a, для которого ΔTh = 4 нс (см. Requirement на рисунке 9). Это ограничение оказалось слишком сложным, что привело к его нарушению. Данные поступают на вход защелкивающего триггера на 3.926 нс раньше, чем требуется.
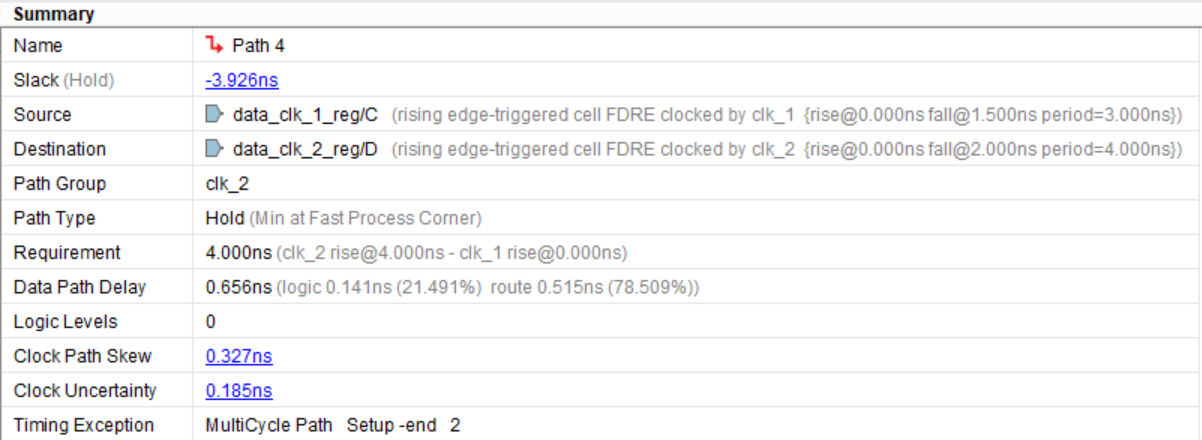
Рисунок 9. Раздел Summary временного отчета для анализа по Hold.
Чтобы исправить новые нарушения временных ограничений, можно сдвинуть положение защелкивающих фронтов для анализа по Hold. Для этого добавим в xdc-файл следующую команду:
|
Ключ -hold говорит, что модификации вносятся в анализ по Hold. Напомним, что при данном анализе проверяются ограничения для текущего запускающего фронта относительно предыдущего защелкивающего [3]. Для временного анализатора это правило обозначается, как Hold = 0. Число 1 в команде set_multicycle_path изменяет это правило на Hold = 1. Это приводит к смещению положения защелкивающих фронтов на один период влево. Обновленная временная диаграмма для тактовых сигналов представлена на рисунке 10.
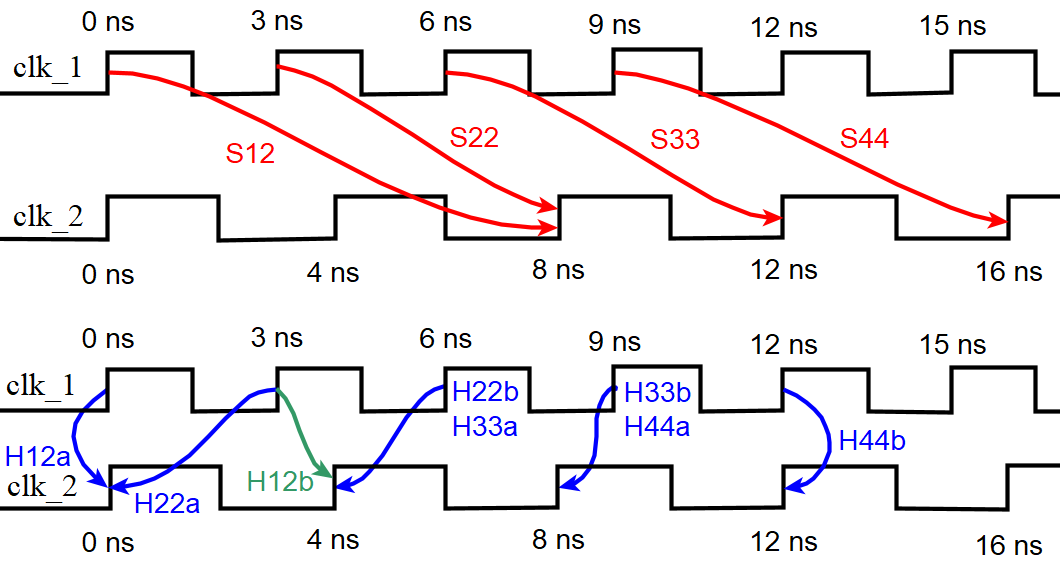
Рисунок 10. Диаграммы сигналов для временного анализа.
Изучим, что изменилось во временных отчетах. Для анализа по Setup по-прежнему самым критичным случаем является пара фронтов S22 (см. рисунок 11). При анализе по Hold рассматривается условие H12a, для которого после изменения положения защелкивающего фронта получаем ΔTh = 0 нс (см. Requirement на рисунке 12). Это условие не такое сложное, и теперь временные ограничения выполнены.
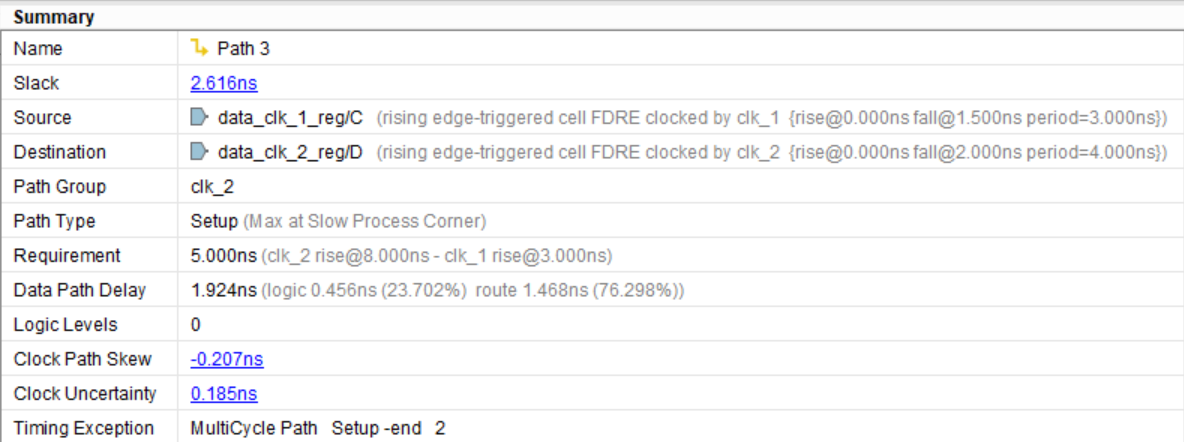
Рисунок 11. Раздел Summary временного отчета для анализа по Setup.
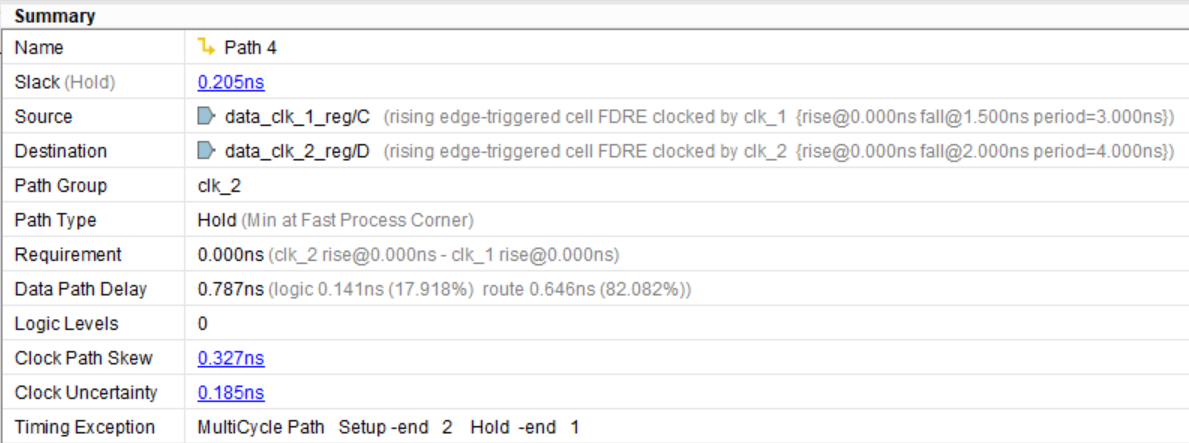
Рисунок 12. Раздел Summary временного отчета для анализа по Hold.
К сожалению, радоваться пока рано. Из рисунка 10 видно, что, несмотря на тот, что условие H12b больше ни с кем не конфликтует, оно по-прежнему игнорируется при временном анализе. Это приводит к следующей проблеме.
Данные запущенные в момент времени 3 нс, точно не будут защелкнуты фронтом clk_2, который появляется в нулевой момент времени (H22a). Также эти данные точно будут приняты фронтом clk_2 в момент времени 8 нс (S22). Вспоминая, что анализ проводится для ΔTh = 0 нс, получаем, что данные на входе защелкивающего триггера изменятся в интервале между 3 и 8 нс. Может случится так, что это изменение произойдет в момент времени 4 нс, как раз, когда появляется фронт clk_2. Это в свою очередь может привести к тому, что защёлкивающий триггер перейдет в метастабильное состояние.
Таким образом, изменения, внесенные нами в правила анализа, убрали временные нарушения, но не гарантируют полной защиты от метастабильности. По этой причине важно понимать, как именно проводится временной анализ и какие выводы можно сделать на его основе.
3. Изменение положения запускающего фронта.
С помощью команды set_multicycle_path можно также изменять положение запускающего фронта. Для этого нужно добавить ключ -start. Уберем из xdc-файл все ранее записанные команды set_multicycle_path и внесем следующее:
|
Для анализа по Setup запускающий фронт перемещается влево на одну позицию, что можно увидеть на рисунке 13. Так для пары S22 запускающий фронт появляется в нулевой момент времени. Значение ΔTsu теперь равно 4 нс. Для анализа по Hold фронты также изменяют свое положение. Самым сложным является условие H12a, для которого ΔTh = 0 – (–3) = 3 нс.
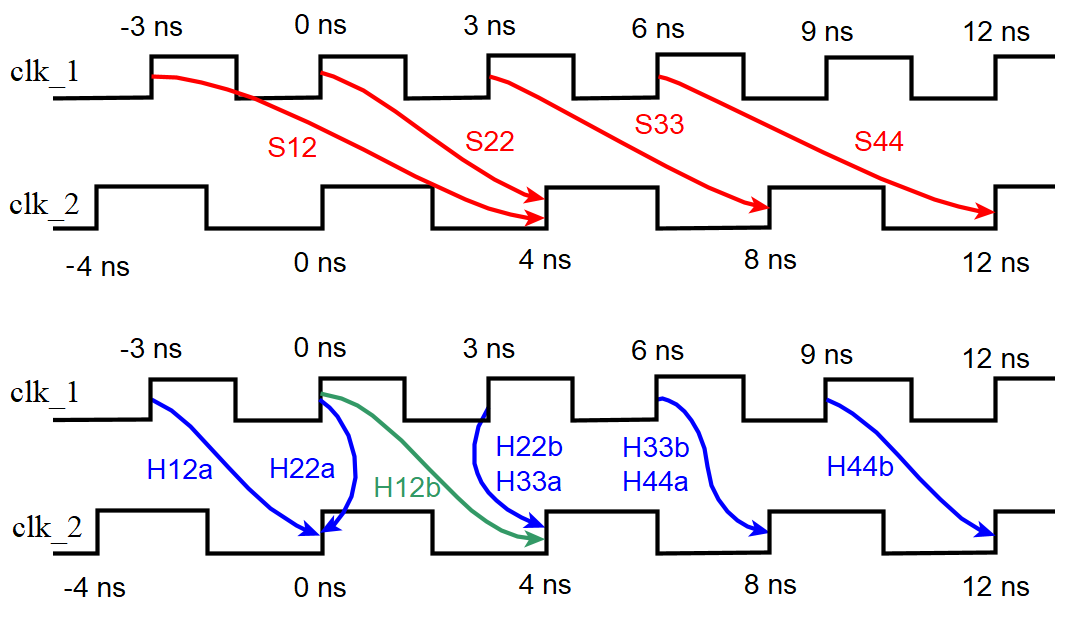
Рисунок 13. Диаграммы сигналов для временного анализа.
Рассмотрим, что изменилось во временных отчетах. Для анализа по Setup, представленного на рисунке 14, получаем, что ситуация только еще сильнее ухудшилась. Значение Slack равно –4.028 нс, хотя до использования команды set_multicycle_path оно было равно –1.145 нс. Причиной является очень большое время распространения данных, равное 7.568 нс (см. строку отчета Data Path Delay). При этом 94% задержки связано с распространением данных через трассировочные линии.
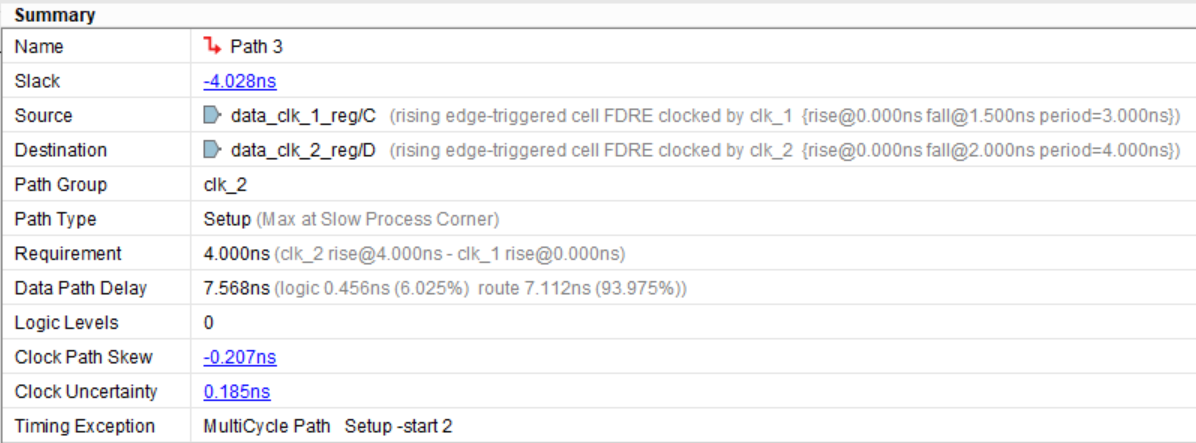
Рисунок 14. Раздел Summary временного отчета для анализа по Setup.
Чтобы понять, откуда взялась такая большая задержка, нужно рассмотреть результаты анализа по Hold, представленные на рисунке 15. Из строки Requirement можно увидеть, что проверяется условие H12a, для которого ΔTh = 3 нс. Чтобы выполнить временные ограничения, необходимо увеличить время распространения данных между триггерами. Это делается за счет увеличения длины трассировочных линий.
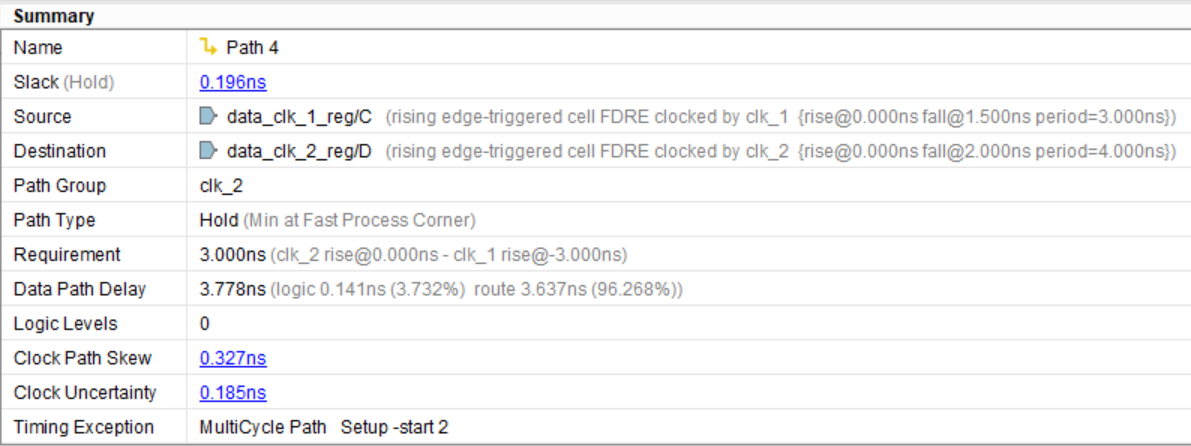
Рисунок 15. Раздел Summary временного отчета для анализа по Hold.
В этом также можно убедиться, если рассмотреть результаты размещения и трассировки проекта, показанные на рисунке 16. Путь между триггерами выделен белым цветом.
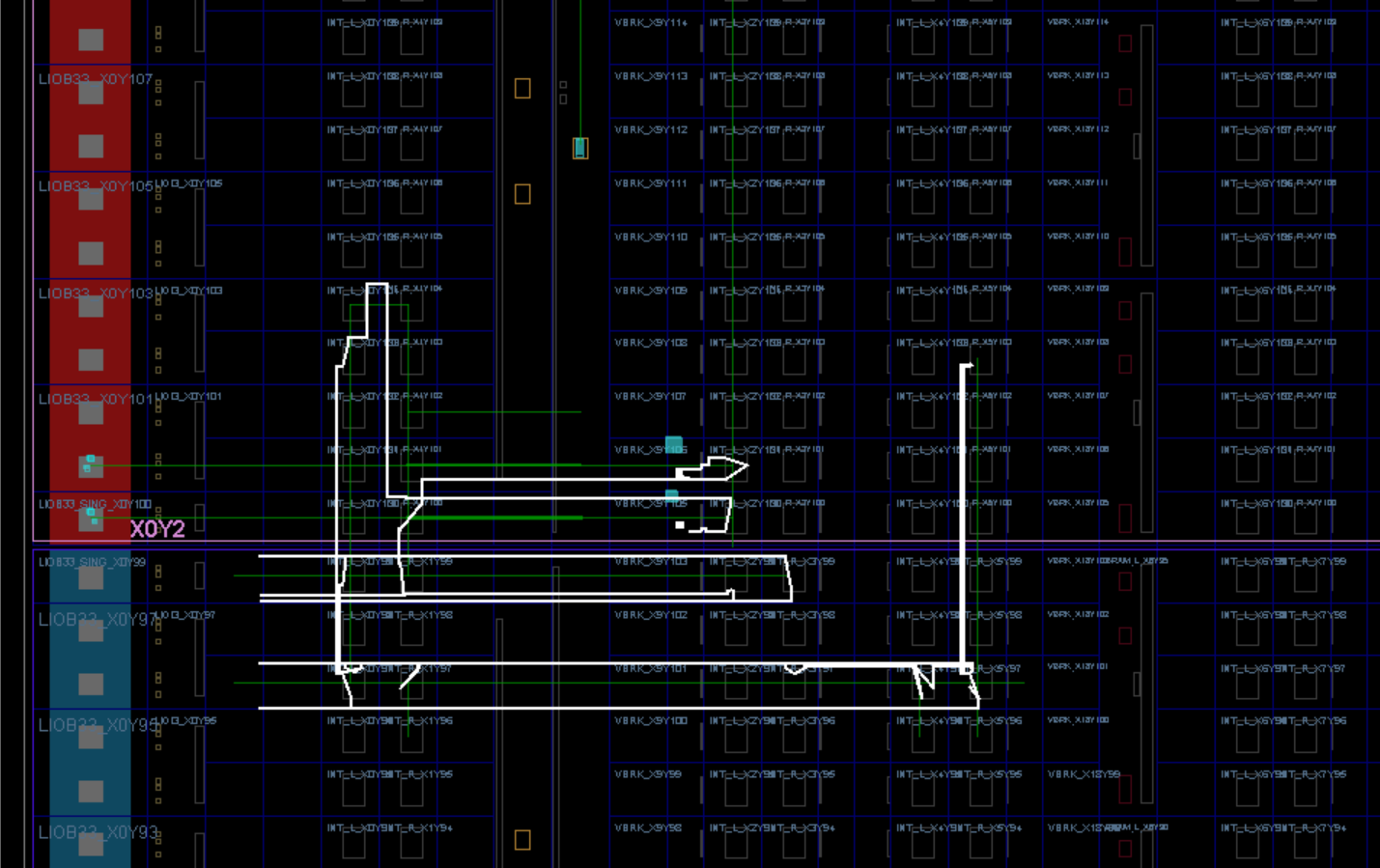
Рисунок 16. Результат размещения и трассировки проекта.
Чтобы ослабить такие сложные ограничения, можно изменить положение запускающих фронтов при анализе по Hold. Для этого добавим в xdc-файл команду set_multicycle_path с ключами -hold и -start:
|
Запускающие фронты для анализа по Hold при этом будут сдвинуты на одну позицию вправо, что можно увидеть на рисунке 17.
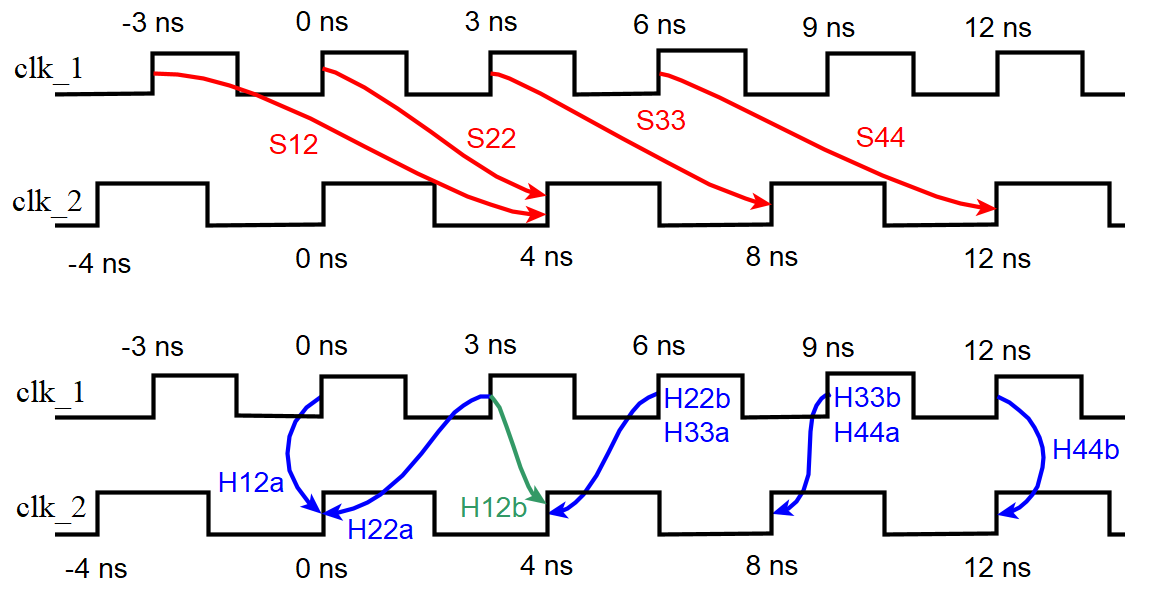
Рисунок 17. Диаграммы сигналов для временного анализа.
Требования по Setup при этом не изменяются, и самое сложное ограничение по-прежнему соответствует паре фронтов S22 (см. рисунок 18).
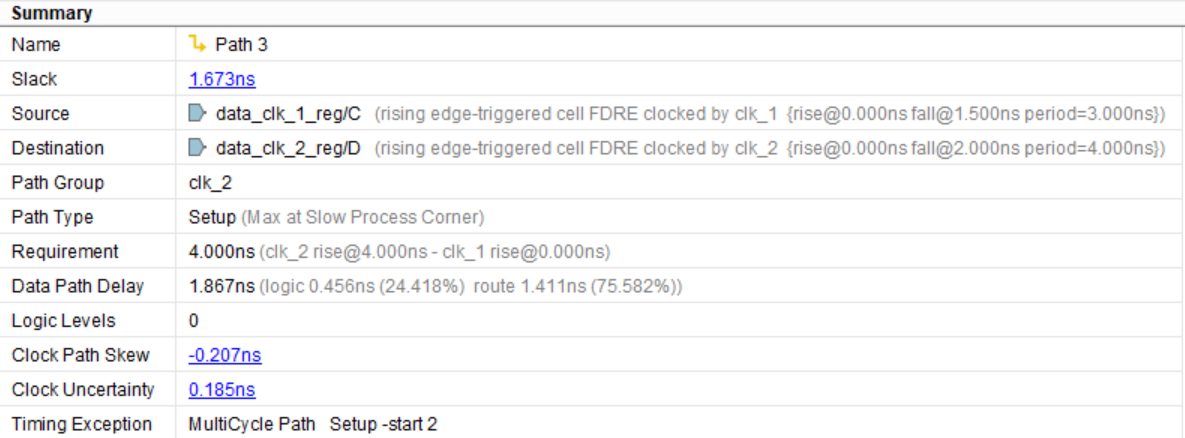
Рисунок 18. Раздел Summary временного отчета для анализа по Setup.
Анализ по Hold проводится при условии H12a, для которого значение ΔTh теперь равно 0 нс, что можно увидеть из строки Requirement на рисунке 19. Как и раньше, несмотря на тот, что условие H12b больше ни с кем не конфликтует, оно игнорируется при временном анализе.
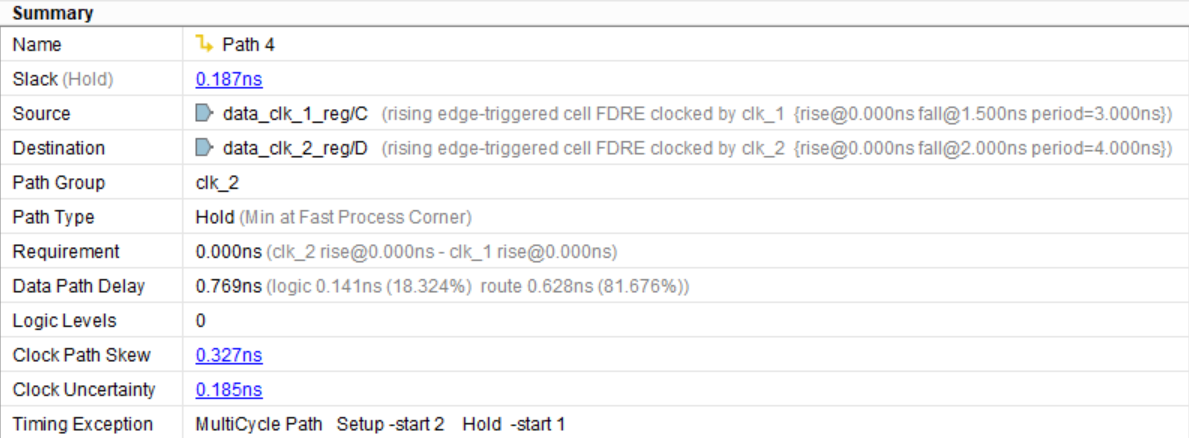
Рисунок 19. Раздел Summary временного отчета для анализа по Hold.
Требования по Hold стали проще, и задержку распространения данных можно сделать меньше. Из рисунка 20 можно увидеть, что длина трассировочных линий теперь намного короче. Исходя из результатов отчетов, получаем, что все временные ограничения выполнены.
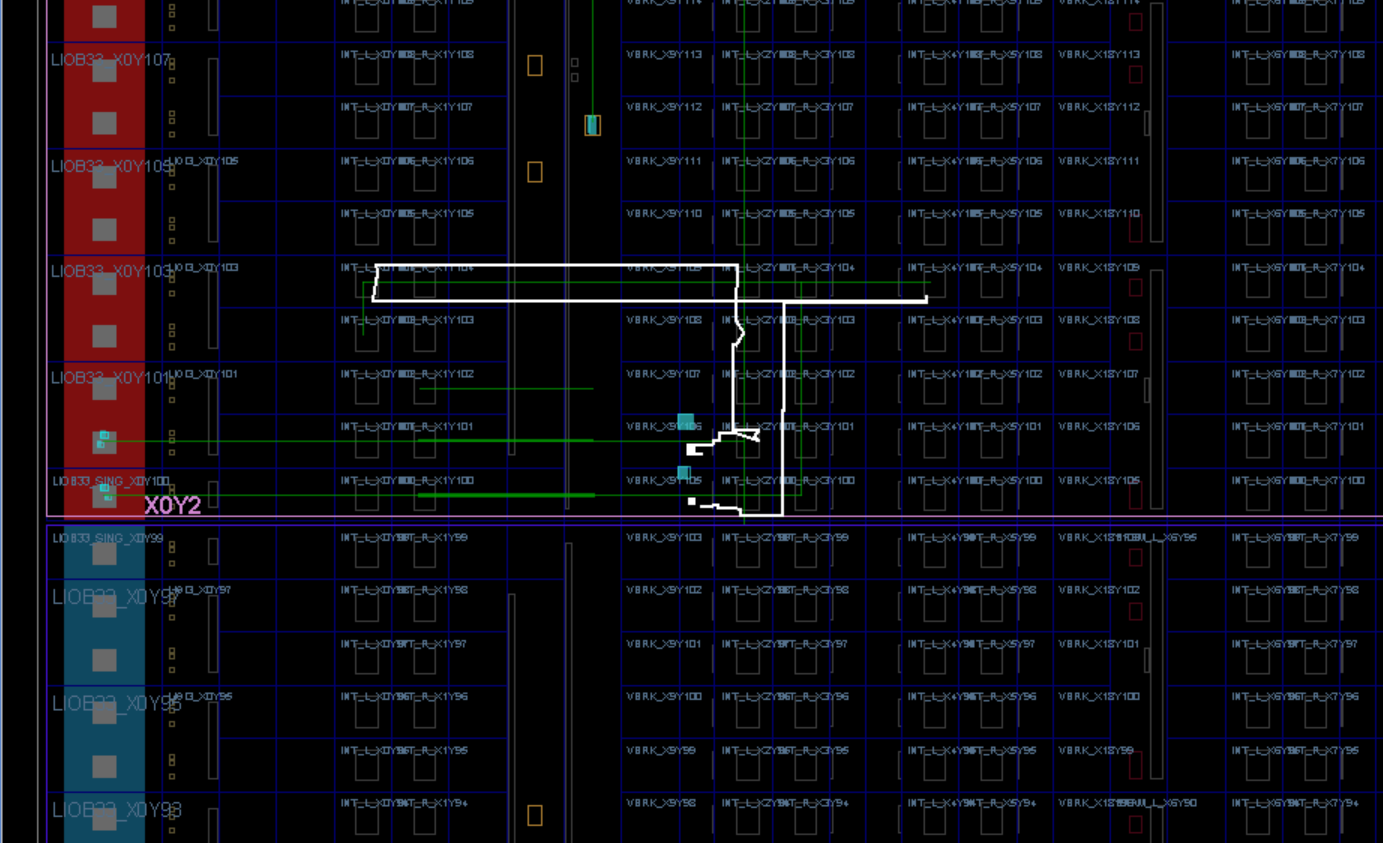
Рисунок 20. Результат размещения и трассировки проекта.
Однако, как и в предыдущем разделе, из-за игнорирования условия H12b мы не можем гарантировать отсутствие проблем с метастабильностью. Например, данные запущенные в нулевой момент времени точно будут приняты фронтом clk_2 через 4 нс (пара S22 на рисунке 17). В свою очередь данные передаваемые следующим фронтом будут приняты в момент времени 8 нс (пара фронтов S33). Из-за того, что условие H12b не учитывается, данные, запущенные фронтом из S33, могут начать изменяться на входе защелкивающего триггера в момент прихода защелкивающего фронта из S22. Такая ситуация может приводить к тому, что триггер будет попадать в метастабильное состояние.
Рассмотренный выше пример передачи данных между тактовыми доменами иллюстрирует возможности и способы применения команды set_multicycle_path. Однако, конкретно для этого примера изменений положения фронтов с помощью set_multicycle_path недостаточно, чтобы гарантировать корректность передачи данных. Единственный способ решения проблемы – это добавить между доменами синхронизатор и исключить путь из временного анализа. Несколько ситуаций, где применение команды set_multicycle_path является крайне полезным, рассмотрены в следующих разделах.
4. Сдвиг фазы тактового сигнала.
В качестве первого практического примера разберем ситуацию, когда требуется передать данные между двумя доменами, которые тактируются сигналами, сдвинутыми по фазе. Рассмотрим тот же проект, что и в предыдущих разделах. Его схема представлена на рисунке 4.
На ножку FPGA приходит тактовый сигнал i_clk с периодом 10 нс, из которого с помощью PLL формируются два сигнала clk_1 и clk_2 с периодом 4 нс. Пусть также сигнал clk_2 задержан относительно clk_1 на 90 градусов (1 нс). Настройки PLL представление на рисунке 21.

Рисунок 21. Настройки PLL.
Добавим в xdc-файл команды, задающие период входного тактового сигнала и изменяющие имена выходных сигналов PLL:
|
Временная диаграмма сигналов показана на рисунке 22. Для каждой пары запускающих и защелкивающих фронтов находим, что ΔTsu = 1 нс. Для всех условий для анализа по Hold также получаем одинаковые значения ΔTh = –3 нс.
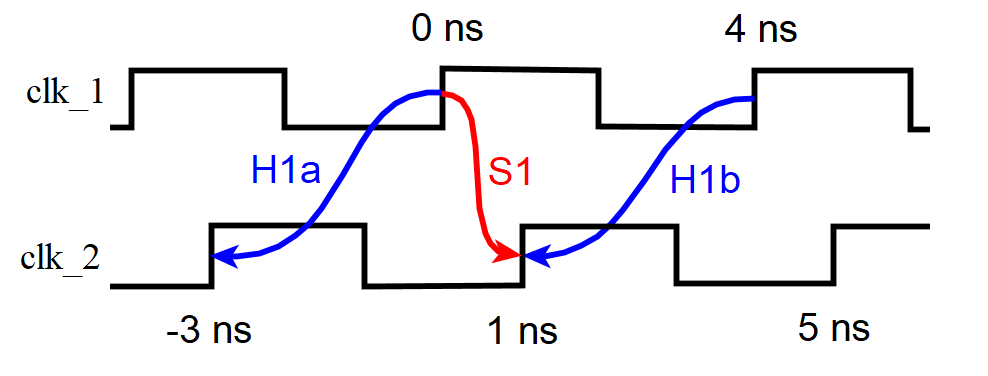
Рисунок 22. Диаграммы сигналов для временного анализа.
Это подтверждается временными отчетами, представленными на рисунках 23 и 24. Можно увидеть, что анализ по Setup проводится для пары фронтов S1, а анализ по Hold – для условия H1b. Требование для анализа по Setup (ΔTsu = 1 нс) слишком сложное, что приводит к нарушению временных ограничений. Данные опаздывают на 0.215 нс.
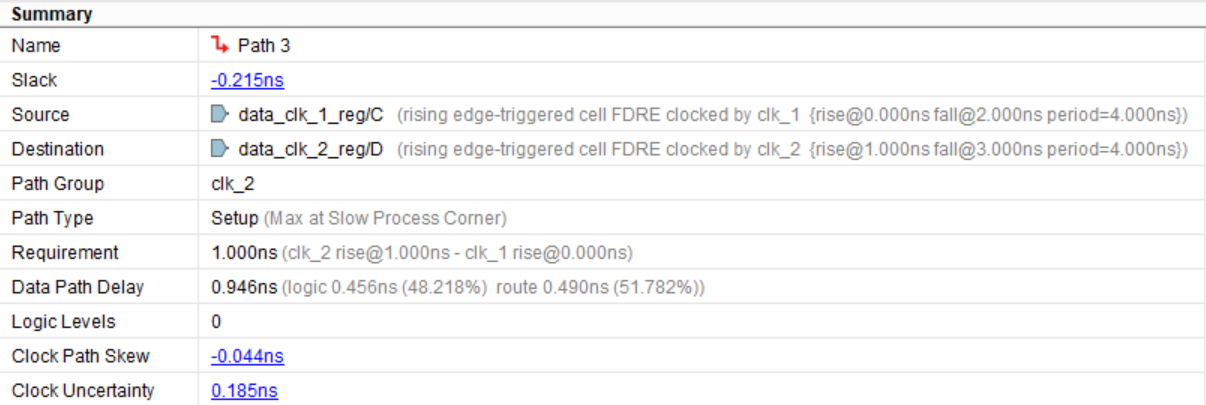
Рисунок 23. Раздел Summary временного отчета для анализа по Setup.
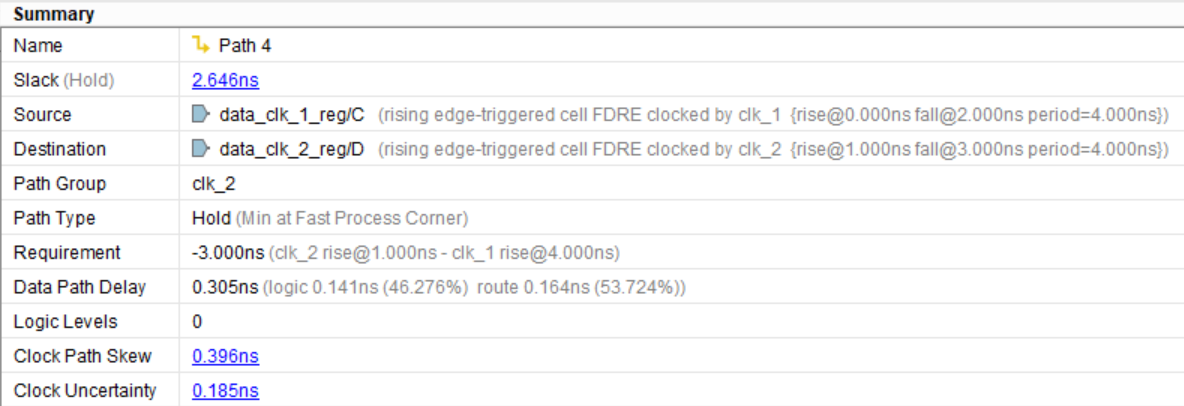
Рисунок 24. Раздел Summary временного отчета для анализа по Hold.
Ограничения по Setup можно упростить, если защелкивать данные не ближайшим фронтом clk_2, а следующим через один период. То есть сдвинуть защелкивающий фронт на одну позицию вправо. Для этого добавим в xdc-файл команду set_multicycle_path:
|
Обновленная временная диаграмма для тактовых сигналов показана на рисунке 25. Для анализа по Setup получаем, что ΔTsu = 5 нс. Защелкивающие фронты для анализа по Hold также смещаются, и теперь значение ΔTh равно 1 нс.
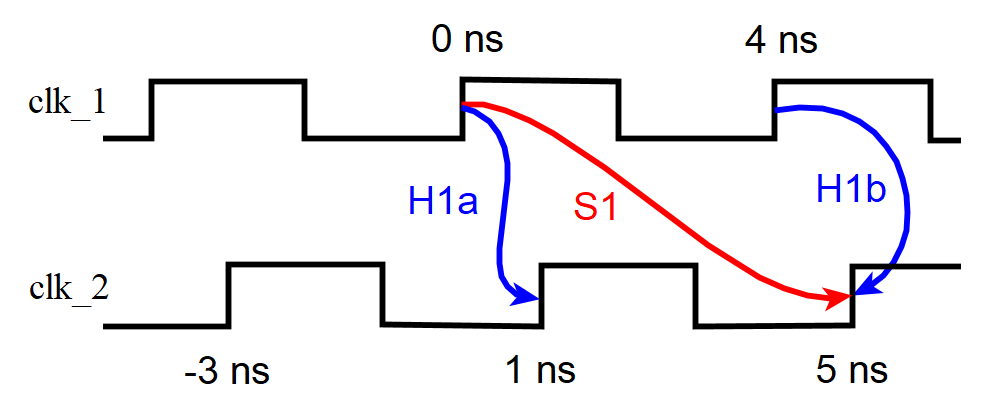
Рисунок 25. Диаграммы сигналов для временного анализа.
Временные отчеты после внесения изменений представлены на рисунках 26 и 27. Можно увидеть, что теперь ограничения выполнены.
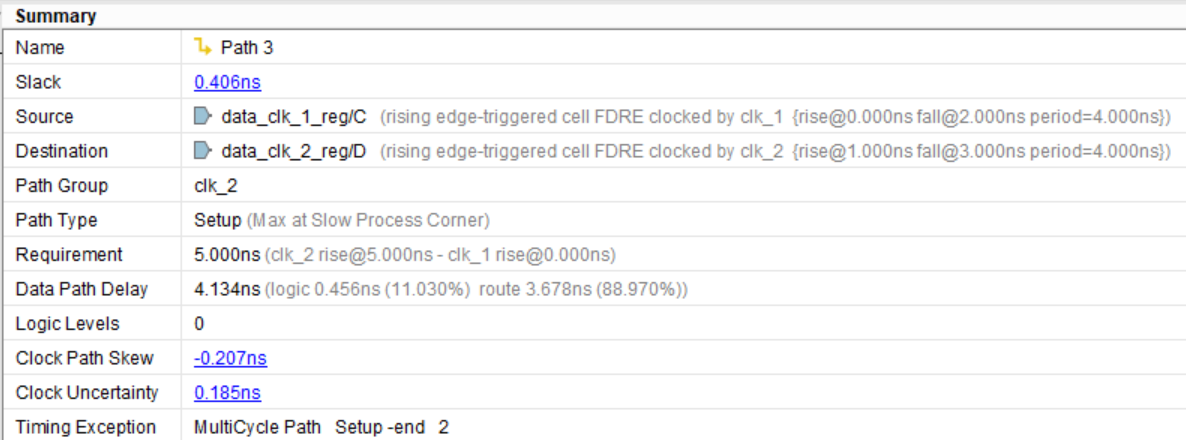
Рисунок 26. Раздел Summary временного отчета для анализа по Setup.
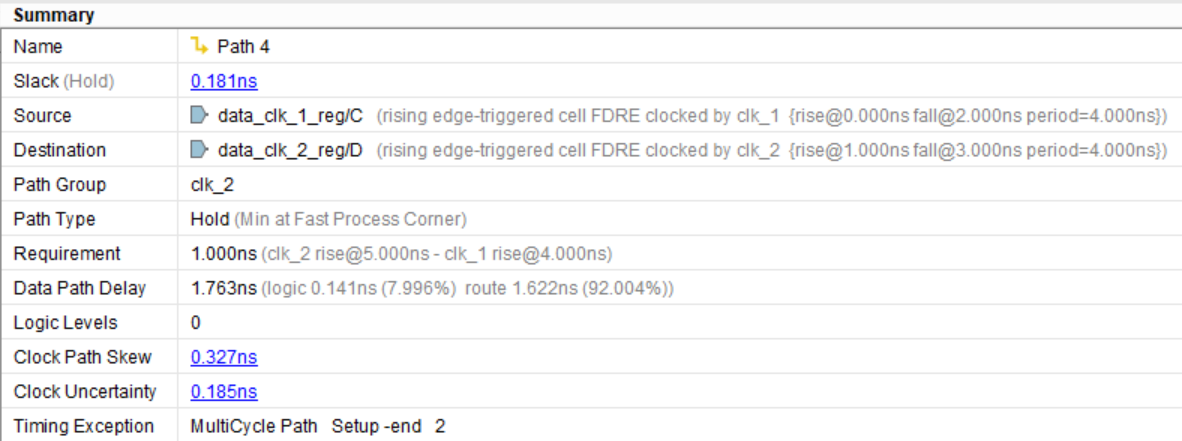
Рисунок 27. Раздел Summary временного отчета для анализа по Hold.
5. Работа модуля по строб-сигналу.
Команда set_multicycle_path может оказаться очень полезной при изменении правил временного анализа для модулей, которые имеют управляющий строб-сигнал. Рассмотрим проект, описание которого представлено ниже:
|
Проект состоит из 32-битного счетчика и формирователя строб-сигнала. Строб-сигнал counter_ce инвертирует свое значение по каждому фронту тактового сигнала clk. Этот сигнал поступает на входы clock enable (CE) триггеров, которые входят в состав счетчика. Счетчик изменяет свое состояние по фронту clk только при условии, что значение строб-сигнала counter_ce равно единице, то есть каждый второй такт.
Пусть требуется, чтобы счетчик тактировался сигналом с периодом 2.5 нс. В xdc-файл с ограничениями добавим следующую команду:
|
Диаграмма сигналов, используемая при временном анализе показана на рисунке 28. По умолчанию данные должны быть приняты ближайшим фронтом тактового сигнала, который поступает на защелкивающий триггер. Таким образом, данные запущенные в нулевой момент времени должны быть приняты спустя 2.5 нс (пара фронтов S1, ΔTsu = 2.5 нс). При анализе по Hold для всех условий получаем, что ΔTh = 0 нс.
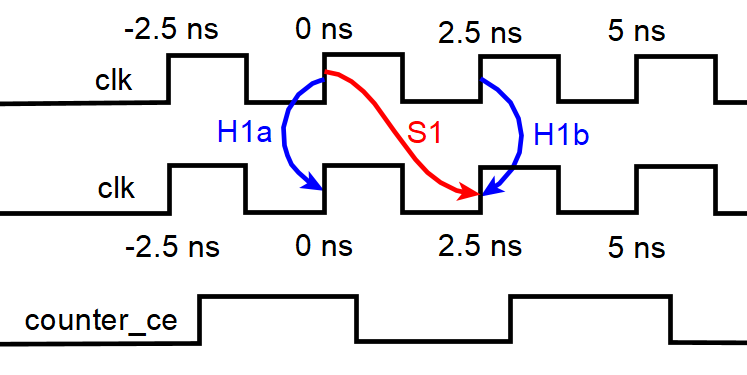
Рисунок 28. Диаграммы сигналов для временного анализа.
Результаты временного анализа показаны ниже (см. рисунок 29). Временные ограничения при анализе по Setup не выполняются для шести путей внутри счетчика. Однако, эти ограничения не отражают реальной ситуации, так как для защелкивающего фронта из пары S1 строб-сигнал counter_ce имеет неактивный уровень. То есть, триггеры счетчика не будут реагировать на этот защелкивающий фронт.
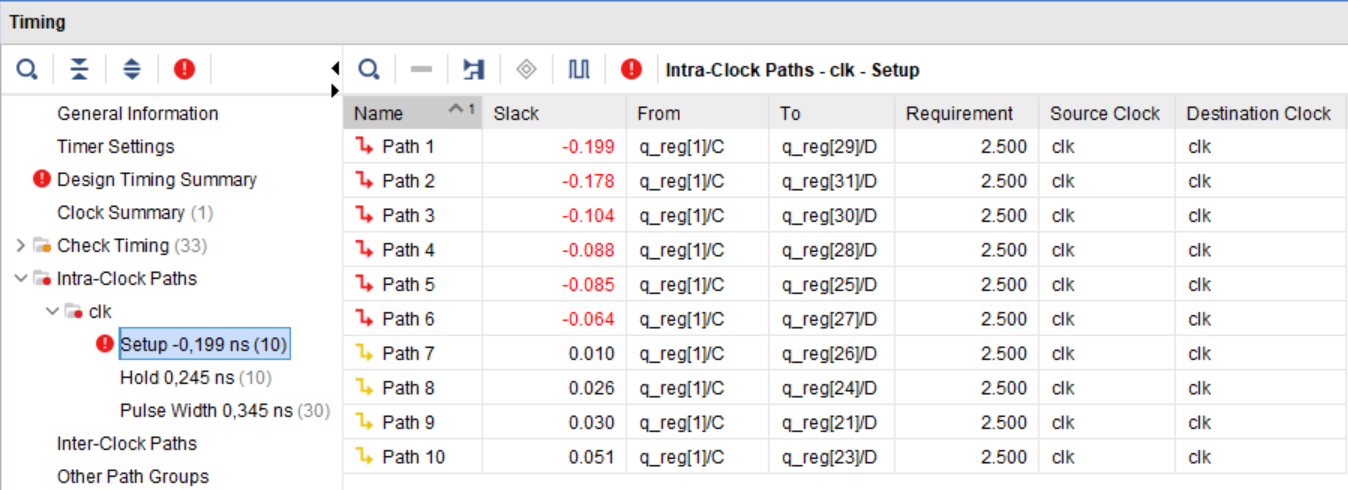
Рисунок 29. Результаты временного анализа.
Данные запущенные в нулевой момент времени должны быть приняты ближайшим фронтом, для которого сигнал counter_ce имеет единичное значение. Этот фронт формируется в момент времени 5 нс. Глядя на рисунок 29, можно увидеть, что худшее значение Slack равно –0.199 нс, то есть фронт, появляющийся спустя 2.5 нс после защелкивающего фронта из пары S1, корректно примет данные (–0.199 + 2.5 > 0). Таким образом, несмотря на наличие нарушений во временных ограничениях, триггеры счетчика не будут попадать в метастабильное состояние.
Чтобы каждый раз не проводить вручную подобные рассуждения, можно модифицировать правила выполнения временного анализа. Добавим в xdc-файл следующие команды:
|
С помощью команды get_cells находим все примитивы с именем q_reg[*], что соответствует поиску всех триггеров счетчика. Результат записывается в переменную counter_flops, которая в дальнейшем используется для указания начала и конца путей с измененными правилами временного анализа. Далее, первая команда set_multicycle_path сдвигает защелкивающий фронт при анализе по Setup на одну позицию вправо. Это приводит к соответствующему сдвигу защелкивающих фронтов для анализа по Hold. Вторая команда set_multicycle_path возвращает эти фронты на прежнее место. Обновленная диаграмма сигналов, используемая для временного анализа, показана на рисунке 30.
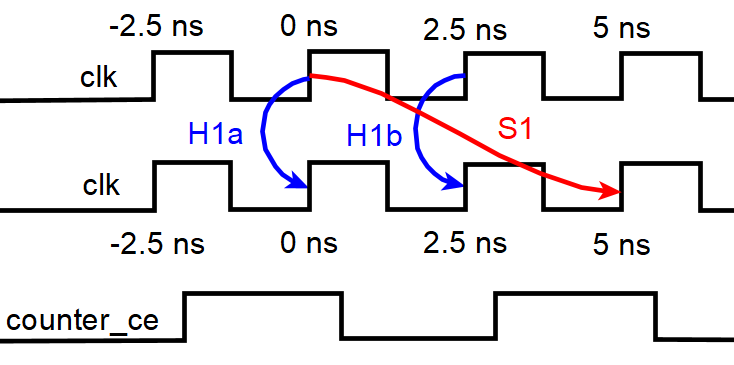
Рисунок 30. Диаграммы сигналов для временного анализа.
Отчет с результатами анализа представлен на рисунке 31. Можно увидеть, что временные ограничения выполняются. Теперь для путей между триггерами счетчика значение ΔTsu равно 5 нс. Правила временного анализа для путей между формирователем строб-сигнала counter_ce и счетчиком не модифицировались, и для них по-прежнему ΔTsu = 2.5 нс.
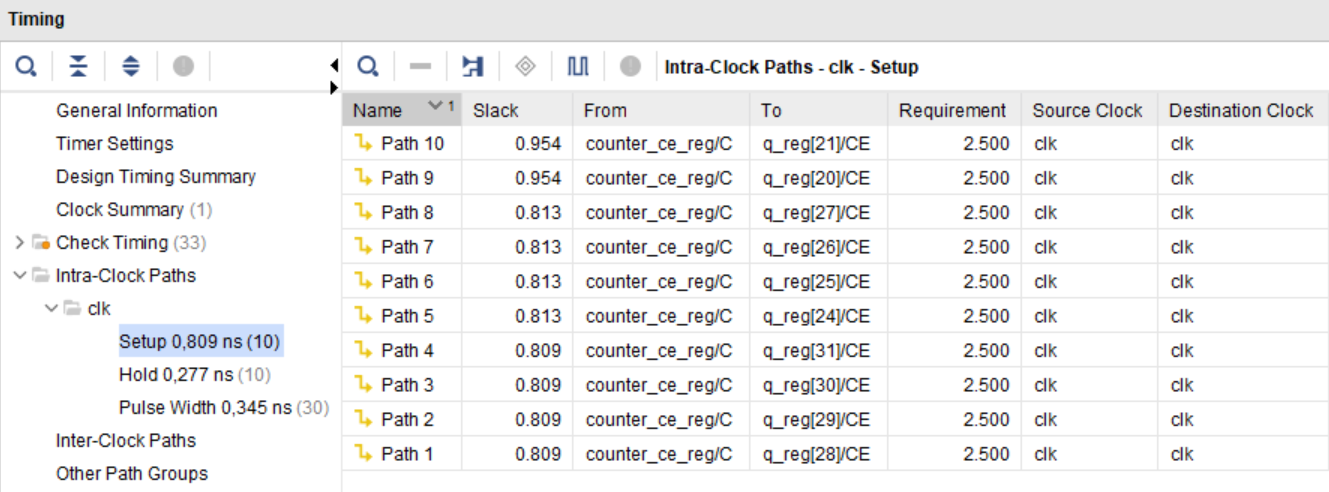
Рисунок 31. Результаты временного анализа.
Дополнительно рассмотрим еще пару способов указания начала и конца путей, на которые должна воздействовать команда set_multicycle_path. После проведения оптимизаций при синтезе и имплементации к именам триггеров могут добавляться дополнительные суффиксы, поэтому иногда удобно выполнять поиск следующим образом:
|
С помощью команды get_cells находим все примитивы проекта, имена которых начинается с символа q. Это могут быть и триггеры, и LUT счетчика. Далее с помощью ключа -filter удаляем все примитивы, которые не являются триггерами.
В качестве еще одного варианта можно постараться найти все триггеры, на вход CE которых поступает строб-сигнал counter_ce. Для этого воспользуемся следующими командами:
|
С помощью команды get_nets получаем строб-сигнал counter_ce. Далее используем команду get_pins для поиска входных пинов, на которые приходит строб-сигнал и имя которых заканчивается на CE. Наконец, командой get_cells получаем все примитивы, которым принадлежат найденные ранее пины.
6. Ограничения для входных и выходных сигналов.
В завершение рассмотрим, как можно использовать команду set_multicycle_path для изменения правил временного анализа для входных и выходных сигналов.
В [4] был рассмотрен временной анализ при передаче данных из FPGA во внешнее устройство для случая Source Synchronous. На рисунке 32 показан анализируемый путь, на который нанесены задержки сигналов. Более подробно о введенных обозначениях можно прочитать в [4].
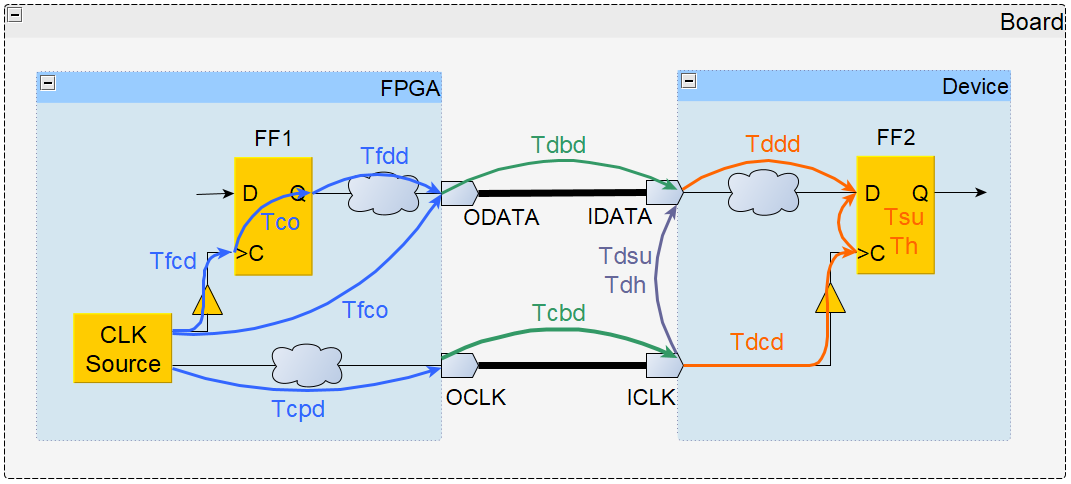
Рисунок 32. Путь с задержками для данных и тактовых сигналов.
В качестве примера, пусть в FPGA загружен простой проект, состоящий всего из одного триггера. Его описание на SystemVerilog представлено ниже:
|
В качестве внешнего устройства рассмотрим в микросхему Ethernet PHY LAN8740A [5]. На рисунке 33 приведены таблица со значениями задержек и временная диаграмма сигналов из datasheet на LAN8740A. Для краткости временные ограничения будут продемонстрированы для одного выходного сигнала FPGA, который подключен к ножке TXD[0] микросхемы LAN8740A.
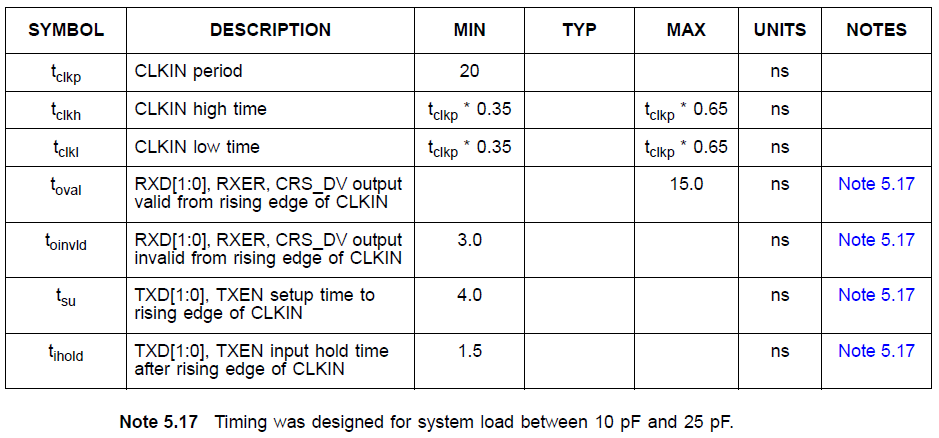
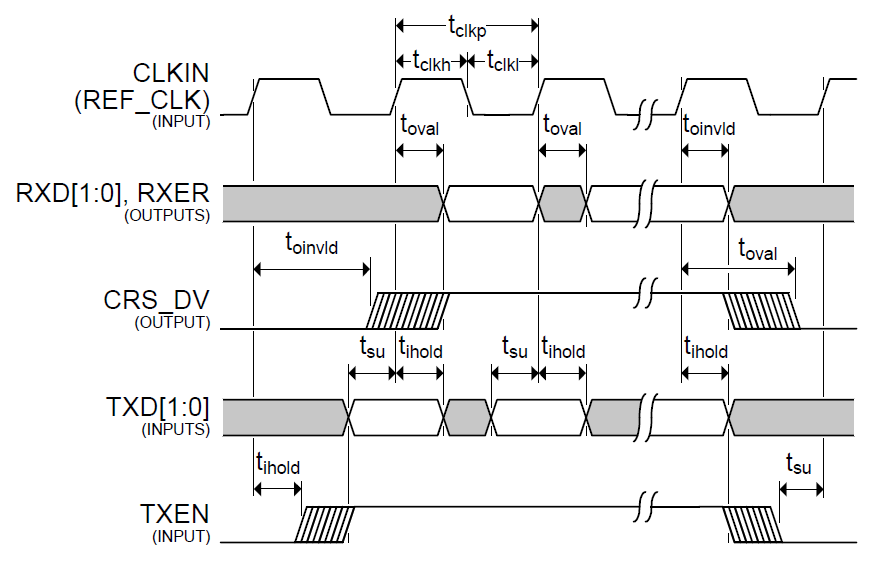
Рисунок 33. Задержки и временные диаграммы для LAN8740A.
Из рисунка 33 получим время установки Tdsu и удержания Tdh для LAN8740A, а также минимальный период такового сигнала. Также будем считать, что минимальные и максимальные задержки распространения данных и тактового сигнала по дорожкам печатной платы известны. В качестве примера рассмотрим следующие значения в наносекундах: Tdbd_max = 0.15, Tdbd_min = 0.1, Tcbd_max = 0.12 и Tcbd_min = 0.07.
Занесем эти задержки в xdc-файл и сразу добавим ограничения на период входного (i_clk) и выходного (o_clk) тактовых сигналов:
|
Пусть требуется запускать данные из FPGA и принимать их микросхемой LAN8740A с помощью одного и того же фронта тактового сигнала. В [4] для этого случая были получены следующие уравнения:

По умолчанию при временном анализе по Setup защелкивающим фронтом считается следующий фронт тактового сигнала (правило Setup = 1). Нам же требуется, чтобы запускающий и защелкивающий фронты совпадали, поэтому в уравнение для output_delay_max пришлось добавить дополнительное слагаемое Tclk. По той же причине слагаемое Tclk появляется в уравнении для анализа по Hold.
Основываясь на уравнениях (2), добавим в xdc-файл ограничения для выходного сигнала o_data:
|
Ниже показаны разделы временного отчета, описывающие задержки для защёлкивающего фронта такового сигнала. При анализе по Setup (см. рисунок 34) считается, что защелкивающий фронт формируется в момент времени 20 нс, что на один период позже появления запускающего фронта. Дополнительная задержка в 20 нс компенсируется за счет слагаемого Tclk в уравнениях (2), поэтому в отчете величина output delay равна –24.080 нс.
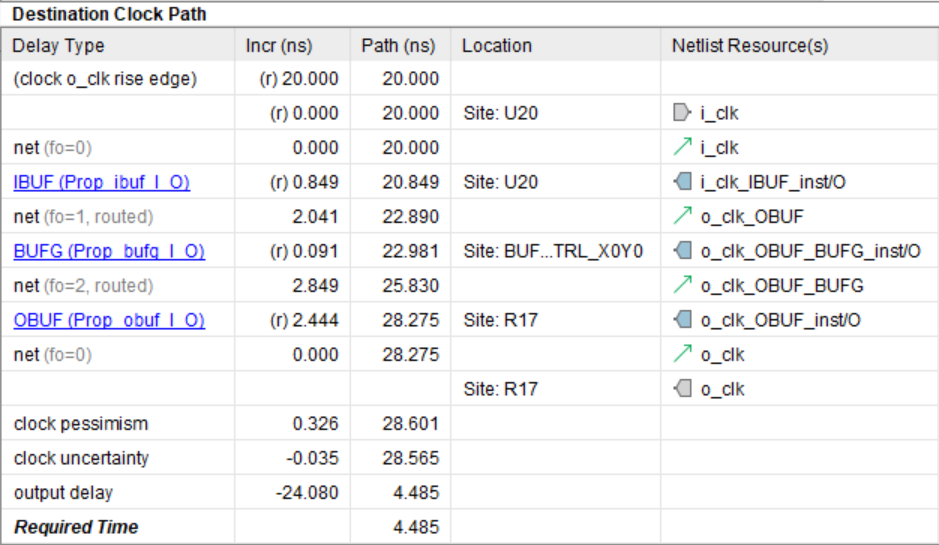
Рисунок 34. Задержки для защелкивающего фронта при анализе по Setup.
Та же картина наблюдается при анализе по Hold (см. рисунок 35). Предыдущий защелкивающий фронт должен формироваться на один период раньше запускающего, то есть в –20 нс. Однако, он появляется в нулевой момент времени. По этой причине в отчете значение output delay равно –18.480 нс.
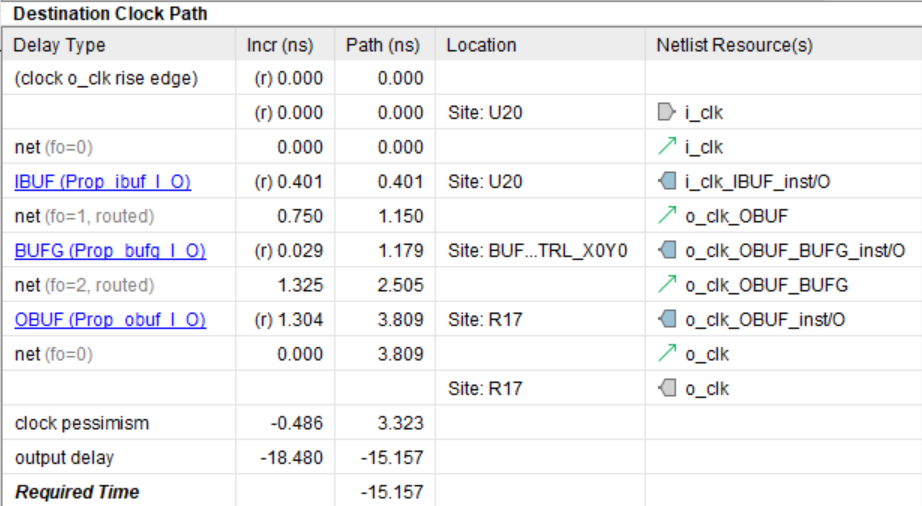
Рисунок 35. Задержки для защелкивающего фронта при анализе по Hold.
Все описанные выше несоответствия усложняют интерпретацию временных отчетов. Эту проблему можно решить, если модифицировать правила временного анализа с помощью команды set_multicycle_path. Для начала удалим из уравнений (2) слагаемые Tclk. Теперь они примут вид:

Соответствующим образом обновим временные ограничения для выходного сигнала o_data в xdc-файле:
|
Для анализа по Setup по умолчанию временной анализатор считает, что защелкивающий фронт формируется спустя один период после запускающего (правило Setup = 1). Нам же требуется, чтобы они появлялись в один и тот же момент времени. Для этого подвинем защелкивающий фронт на одну позицию влево. Это обозначается в виде правила Setup = 0. Добавим в xdc-файл следующую команду:
|
Как и ранее ключ -end указывает, что изменяется положение защелкивающего фронта. Обратите внимание, что выше отсутствует ключ -from, то есть не указано начало пути. Так можно делать, и в этом случае модифицируется анализ для всех путей, которые заканчиваются на выходной ножке o_data FPGA.
Рассмотрим, какие изменения произошли во временных отчетах. При анализе по Setup теперь, как и ожидается, защелкивающий фронт появляется в нулевой момент времени. Также обратите внимание, что на рисунке 36 отсутствует величина clock uncertainty, задающая неопределенность для тактового сигнала из-за джиттера. Теперь запускающий и защелкивающий фронты это один и тот же фронт, поэтому джиттер не оказывает никакого влияния. Таким образом, временной отчет стал не только более понятным, но и более точным.
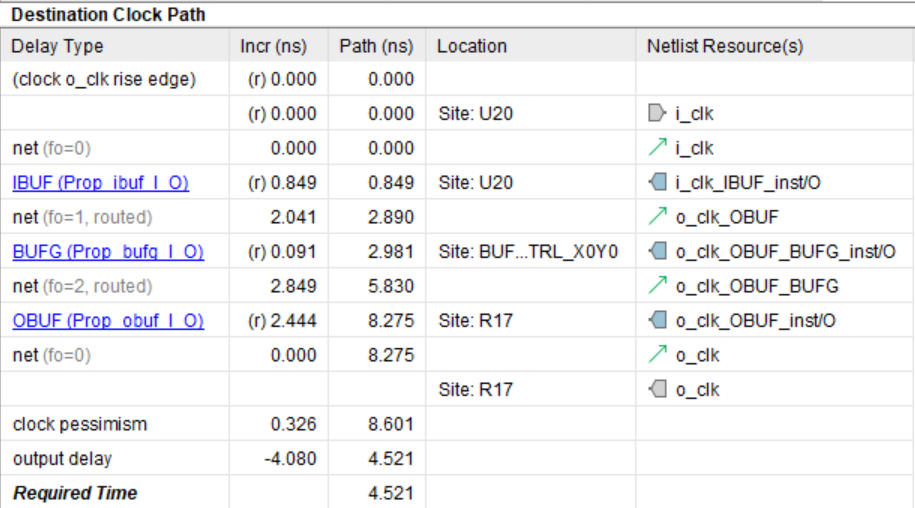
Рисунок 36. Задержки для защелкивающего фронта при анализе по Setup.
При анализе по Hold защелкивающий фронт теперь формируется в момент времени –20 нс (см. рисунок 37). Строка clock uncertainty теперь наоборот появляется, так как теперь запускающий и предыдущий защелкивающий фронты – это разные фронты.
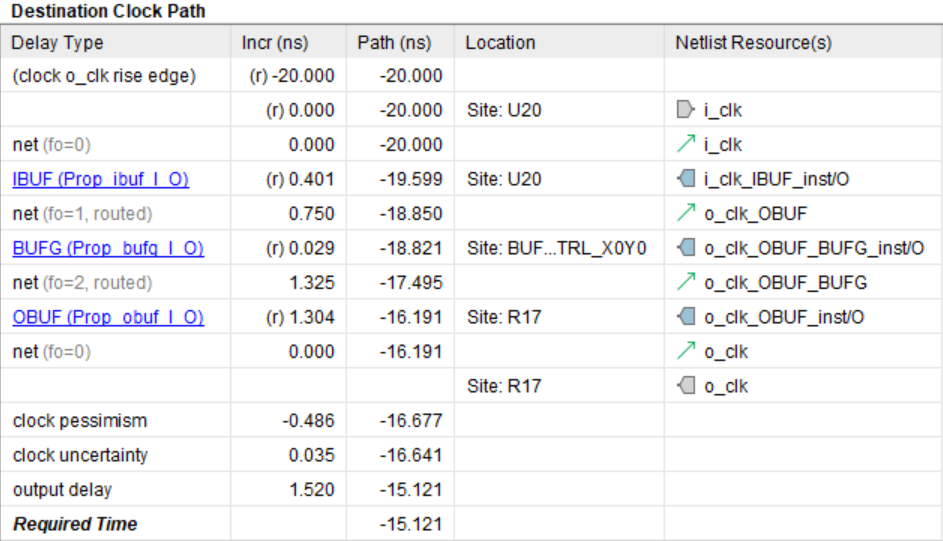
Рисунок 37. Задержки для защелкивающего фронта при анализе по Hold.
Заключение
В статье представлен способ модификации правил проведения временного анализа. Показаны возможности использования команды set_multicycle_path для исправления нарушений во временных ограничениях. Рассмотрено несколько практических примеров.
Ссылки
1. Основы статического временного анализа. Часть 5: False Path Constraint
2. Vivado Design Analysis and Closure Techniques (UG 906)
3. Основы статического временного анализа. Часть 1: Period Constraint
4. Основы статического временного анализа. Часть 4: Source Synchronous Output Delay Constraint
Статья будет доступна в формате PDF чуть позже